

Episodul LXXII: Ecranoplanul – Partea I

Exista in istoria tehnologiei aparute pe Terra o categorie aparte de “masini” ce nu pot fi incadrate ca fiind barci sau avioane, tehnologie considerata pana la sfarsitul anilor *80 strict secreta, o mare reusita a cercetatorilor, proiectantilor si constructorilor sovietici. Bazat pe un principiu bine cunoscut in aerodinamica numit WIG/Wing-In-Ground-Effect (Zbor cu efect de sol), acest vehicul venea sa rezolve una dintre problemele perene cu care s-au confruntat constructorii navali si anume, cresterea vitezei de deplasare a navelor de suprafata in combinatie cu un corp de rezistenta hidrodinamic si propulsie de mare putere.
Desi principiul efectului de sol nu era deloc nou, nicidecum descoperit de catre sovietici, acestia au marele merit in dezvoltarea si implementarea sa cu succes, aducandu-l de la teorie la practica, printr-o serie de vehicule deosebite cunoscute sub numele generic de EKRANOPLAN (denumirea in limba rusa a WIG, foarte probabil). Inainte insa de a vedea de unde-au pornit si unde-au ajuns sovieticii, este util a intelege mai intai fenomenul efectului de sol (WIG), fenomen descoperit la inceputul secolului XX, si care a fost pus in evidenta in perioada interbelica, ba chiar a dus la realizarea vaselor rapide cu aripi subacvatice si a hovercrafturilor (nave pe perna de aer. Navele pe perna de aer/perna pneumatica se deplaseaza prin alunecare pe un strat de aer, acesta fiind pompat cu ajutorul unor turbosuflante verticale -experimentate la primul hovercraft realizat de catre britanici, SR.N-1/Saunders-Roe Nautical -1, creat de catre Christopher Cockerell in anul 1959 -sub nava, ceea ce duce la separarea de suprafata apei. Practic, nava pluteste la inaltimi cuprinse intre 0,5-3 m. Datorita lipsei rezistentei de frecare si a contactului cu suprafata dura a apei, creste substantial viteza de deplasare a navei, aceasta putand naviga si pe deasupra apelor putin adanci, a lacurilor, a fluviilor, a zonelor inundate si a mlastinilor).
WIG consta in aparitia unei forte de sustentatie suplimentara ce se exercita asupra aripii unui avion ce evolueaza in apropierea solului sau a apei, insa fenomenul apare pe orice suprafata plana si uniforma. Este, mai bine spus, efectul de portanta generat de catre aripile unei aeronave ce se deplaseaza foarte aproape de sol, cu deosebire a celor aflate in regim de decolare-aterizare (pana la explicatia stiintifica a fenomenului au fost inregistrate dezastre si catastrofe soldate cu pierderi de vieti omenesti si pagube materiale, inregistrate drept erori de pilotaj sau defectiuni tehnice). Specialistii mai numesc acest efect drept “supraportanta”, practic, intre aripi si suprafata deasupra careia se zboara la mica altitudine se formeaza ceea ce expertii numesc “perna de aer” (aerul dizlocuit de aripile aeronavei se loveste de sol si se comprima usor crescand presiunea acestuia sub aripa, ceea ce duce la aparitia “fortei de sustentatie” ce ridica si mentine aparatul in aer, adica, un fel de ecran pe care aeronava aluneca.
Pentru mentinerea acestui efect, aripile aeronavei nu trebuie sa se departeze prea mult de sol, de suprafata deasupra careia se zboara, inclusiv suprafata apei si, bineanteles, cu cat apropierea aripilor fata de suprafata este mai mare, cu atat supraportanta este mai mare, permitand acestor vehicule speciale sa poata lua incarcaturi mari, reducand substantial consumul de combustibil). Desi cercetari cu privire la acest aspect au facut si altii, precum germanii si finlandezii, ulterior si americanii, sovieticii au fost cei care au impulsionat si amplificat cercetarile, in mare secret, nu mult dupa izbucnirea Razboiului Rece, la inceputul anilor *60. Bineanteles, scopul acestor cercetari era dezvoltarea de platforme aero-navale ce trebuiau sa aiba o larga aplicabilitate militara, sa aiba viteza de deplasare mare si sa fie capabile sa transporte trupe si tehnica la distante mari, basca sa lanseze rachete anti-nava sau cu incarcatura nucleara.

Type 025 Huchuan class
Interesant este faptul ca sovieticii n-au pornit de la zero cu cercetarile, ei avand deja realizari sau proiecte in dezvoltare de nave cu aripi subacvatice, precum: Project 206 Shtorm (NATO –Clasa Turya, probabil 51 de unitati construite); Project 1240 Uragam/MRK-5 (NATO –Clasa Sarancha, o singura unitate construita); Project 206MR Vikhr (NATO –Clasa Matka, 12 unitati construite); Project 133 Antares (NATO –Clasa Muravey, 16 unitati construite). Astfel de nave am avut si noi in dotare, de provenienta chineza, Type 025/Type 026 (Clasa Huchuan), acestea fiind cunoscute in Marina Romana drept “Vedete torpiloare cu aripi subacvatice” (VT/Vedete Torpiloare), si-au fost 29 de unitati (3 unitati au fost importate din China la inceputul anilor *70, restul de 26 fiind construite pe Santierul Naval Mangalia, sub licenta.
Cele 3 VT importate din China au fost scoase din uz in anul 1991, restul pana in anul 2004, iesind din inzestrare in cadrul Divizionului 50 Corvete. Doua unitati au fost dezarmate si transformate in unitati de suport pentru scafandri de lupta, fiind botezate Marte si Jupiter. Navele romanesti aveau radar de navigatie chinezesc, Type 753 –Banda I, si IFF sovietic, “High-Pole-A”, fiind inarmate cu doua mitraliere binate in turela deschisa de calibrul 14,5 mm, si doua tuburi lans-torpile de calibrul 533 mm. Viteza era impresionanta, ajungand la 93 km/h. Aceste nave sunt considerate in clasificarea navelor de lupta ca fiind nave de rangul IV (vedete torpiloare, vedete dragoare, vedete purtatoare de rachete, vedete de patrulare. Celelalte clasificari sunt: rangul I –nave de linie, cuirasate, crucisatoare si portavioane; rangul II –distrugatoare, fregate si submarine; rangul III –dragoare, puitoare de mine si vanatoare de submarine).
Aceste aripi portante si aripi imerse, la o anumita viteza in mediul fluid, genereaza portanta considerabila ceea ce ridica prova navei (inainte de iesirea completa a cocii din apa, apare asa-zisul „fenomen de glisare”, ceea ce inseamna cresterea rezistentei de val. Daca nava este propulsata cu putere si viteza corespunzatoare, doar atunci intregul corp al acesteia se poate inalta deasupra apei. Un exemplu deosebit sunt vedetele italiene din Clasa Sparviero. Oricum, densitatea aerului este, conform expertilor, de 840 de ori mai mica decat cea a apei), aceasta avand contact cu apa doar prin intermediul unor aripi cu profil hidrodinamic atasate la coca, aflate partial sau total in imersiune. Aceste aripi creaza portanta asemenea aripilor principale ale aeronavelor permitand atingerea de viteze mari, de peste 120 km/h, rezistenta scazuta la inaintare, cresterea manevrabilitatii si scaderea distantei de oprire a navei.
Acum insa cam bate vantul prin inventarul RO Navy, vantul schimbarii bineanteles, nu altceva, Doamne-fereste! S-a schimbat in “bine” si ii va fi si mai “bine”, ca doar mergem taras-grapis cu inzestrarea, ptiu sa nu ne fie de deochi! Ptiu, ptiu!!! Cu taierile/casarile cum om sta!? In grafic, in grafic…
In speranta ca am reusit sa explic la un nivel acceptabil principiul WIG (“mea culpa” daca n-am reusit), haideti sa vedem care au fost primele vehicule propulsate pe principiul WIG. Cel mai probabil, prima nava cu aripi subacvatice a aparut in anul 1894, aceasta fiind realizata de catre inginerul francez Charles D’Alembert, insa nu a fost o reusita.
Un alt inventator ce s-a “jucat” cu aripile subacvatice a fost italianul Enrico Forlanini. Acesta, un pioner al aeronauticii mondiale putin discutat si putin popularizat, ce a avut trei contributii majore la dezvoltarea acestui domeniu (a construit primul elicopter propulsat de un motor cu aburi in anul 1877, acest vehicul ridicandu-se la impresionanta inaltime de 13 m intr-un zbor ce a durat doar 20 de secunde, reusind sa aterizeze lent si fara incidente. Aeronava avea urmatoarele caracteristici: 2 elici coaxiale contrarotative, una de 1,70 m diametru iar celalata de 2,80 m diametru; greutate vehicul fara boiler 3,50 kg; motor cu aburi de 2 CP; greutate boiler 1,50 kg; a fabricat dirijabile si a inventat barca cu aripi portante). Forlanini a inteles ca principiile zborului pot fi aplicate si pe apa, mediul lichid fiind doar un alt tip de mediu. Inca din anul 1898 el experimenta pe Lacul Maggiore cu ambarcatiuni numite de catre el hidroavioane sau “idrottero/hidroplane”, acestea avand atasate la coca o serie de aripi scufundate care, la o anumita viteza, ridicau complet vasul din apa, crescand substantial viteza de deplasare si rezistenta la inaintare. Forlanini este considerat primul cercetator din lume care a reusit cu ajutorul aripilor scufundate atasate la coca unei nave, sa o ridice complet din apa la atingerea unei anumite viteze.

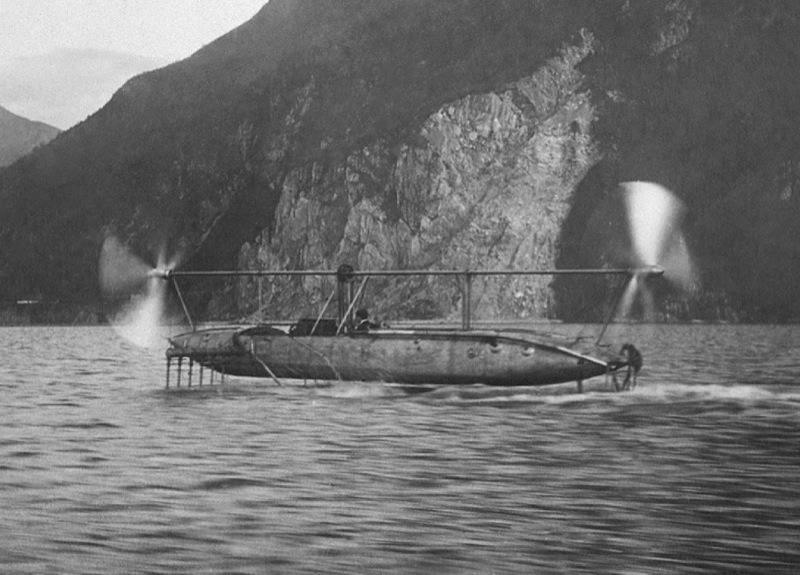
FORLANINI-IDROPLANO 1
Primul sau prototip a fost o mica barca realizata din doua pontoane remorcata de catre un vas cu motor, fiecare ponton avand montat in partea fata si partea spate, aripi subacvatice in forma de scara. Prima barca Forlanini cu aripi subacvatice, realizata si testata in anul 1905 (Lacul Maggiore, 1905), ce s-a ridicat deasupra apei, numita “Idroplano N.1”, avea un aspect nemaivazut pana atunci, impresionand prin cele doua elici de mari dimensiuni dispuse la prora si prova ambarcatiunii, nava avand forma hidrodinamica de trabuc, carma lamelara groasa la partea superioara si subtire la cea inferioara, greutate de 1,60/1,65 tone (1,20 tone, conform unor surse), motor cu combustie interna Fiat, de 60-70 CP, si putea lua la bord un singur pilot, atingand viteza de 70 km/h (56/42,50 km/h, dupa unele surse, a fost viteza reala atinsa de aceasta ambarcatiune. Foarte probabil sa fie asa), nava ridicandu-se la 55 cm deasupra apei.
SALUPA CU ARIPI SUBACVATICE FORLANINI
Acest motor nu s-a dovedit a fi prea fiabil, Forlanini construind “Idroplano N.3” in perioada 1908-1909, de aceasta data echipat cu un motor cu aburi de 25 CP (de tip White), peste o tona greutate, elice scufundata, ambarcatiunea fiind capabila sa atinga impresionanta viteza de 50 km/h. Cel mai impresionant prototip a fost “Idroplano N.7” din anul 1910-1911, testat pe Lacul Maggiore si la Fiumicino (primele teste pe mare) pe data de 29 iulie 1911 (29 aprilie 1911, dupa unele surse), ce avea urmatoarele performante: elice scufundata asemenea unei nave; motor cu ardere interna Fiat, de 100 CP; lungime 10 m; latime barca 3,50 m (inclusiv sistemul de aripi subacvatice); barca se ridica la 65 cm deasupra apei; viteza maxima 75 km/h; 2 tone greutate; putea transporta 6 pasageri (2 membrii ai echipajului+4 pasageri). Pe data de 23 decembrie 1910, cu aceasta ambarcatiune s-a parcurs distanta de 34 km, pe parcursul Laverno-Locarno si retur, in doar 29 de minute cu viteza medie de 70 km/h, ceea ce era o performanta remarcabila si nemaivazuta pana atunci. Interesant este faptul ca in anul 1911, inventatorul telefonului, americanul
Alexander Graham Bell, alaturi de inginerul sef de la Bell, Casey Baldwin, a fost pasager al “Idroplano N.7”, fiind impresionat de caracteristicile sale impresionante si de hidrodinamica aripilor subacvatice, acesta construind propriile ambarcatiuni cu aripi subacvatice numite Hydrodrome/HD, categoric pornind de la designul lui Forlanini. De fapt, Bell si inginerul sef al firmei, Casey Baldwin, incepusera experimentele cu aripi portante inca din vara lui 1908, cel din urma studiind profund realizarile lui Forlanini, astfel ca intalnirea cu inventatorul italian n-a facut decat sa le impulsioneze cercetarile cu privire la navele cu aripi portante. Au realizat mai multe prototipuri de Hydrodrome, unele reusite altele nu, precum: HD-1, in anul 1911, 72-80 km/h viteza maxima atinsa; HD-3, in anul 1913, ce nu s-a dovedit a fi conform asteptarilor. Cel mai reusit avea sa fie Hydrodrome-4/HD-4, realizat in anul 1918 (primul “zbor”, 10 octombrie 1918), ce avea urmatoarele caracteristici: viteza maxima 114 km/h (cu motoare Liberty.
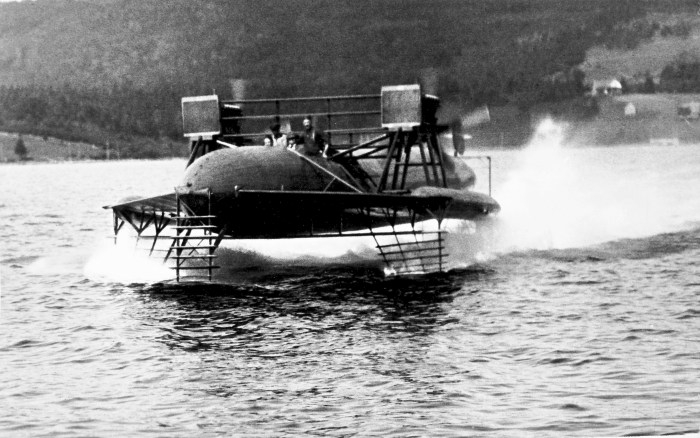
Bell HD-4
A stabilit un record mondial ce a ramas nedoborat timp de 10 ani, pe data de 9 septembrie 1919), cu mult peste transatlanticele vremii ce atingeau doar 48 km/h; coca din lemn acoperita cu panza in forma de torpila piturata in gri, conica la ambele capete; peste 18 m lungime; avea doua seturi de hidroglisoare, unul la prova si celalalt la prora; 2 motoare Renault de cate 250 CP (initial. Aceste motoare asigurau atingerea vitezei maxime de 86 km/h) montate sus cu elicele spre inapoi, ulterior inlocuite cu doua motoare de avion tip Liberty, de cate 350 CP/260 kW, intr-un final livrate in iulie 1919, dupa ce Bell reusise anterior sa convinga conducerea US Navy de avantajele navelor cu aripi portante (inca din anul 1917, insa necesitatile frontului intarziasera livrarea acestor motoare); patru aripi subacvatice, cate doua la prova si la prora. Presa vremii stipula, citez: “Este incredibil, sfideaza legile fizicii, dar e adevarat”…Cu toate acestea, desi se facusera demonstratii in fata ofiterilor si specialistilor, Amiralitatea britanica si US Navy n-au lansat comenzi pentru astfel de nave considerandu-le prea fragile pentru actiuni pe mare, preferand hidroavioanele.
Realizari deosebite a avut si finlandezul Toivo Jujani Kaario, fiind foarte probabil ca acesta sa fi realizat primul ekranoplan din lume. Kaario, inginer specializat in motoare de aeronave, a lucrat la Valtion Lentokonetehdas/VL/State Aircraft Engine Factory Linnavuori/Fabrica de Motoare si Aeronave de Stat Linnavuori din Siuro (fosta IVL/Illmailuvoimien Lentokonetehdas/Aviation Force Aircraft Factory, aparuta in 1921, construind sub licenta aeronave Hansa-Brandemburg W.33 si Caudron C.60. Astazi, este parte integranta a Patria Finavitec Oy, cunoscuta si recunoscuta in intreaga lume), principala companie finlandeza din domeniul aeronautic, infiintata pe data de 23 februarie 1928 (compania dispunea, pentru inceput, de doua ateliere de productie in Helsinki, la Suoemenlinna si Santahamina, locatii militare in acei ani. Interesant este faptul ca fabrica n-avea aeroport propriu, insa marea si gheata formata pe aceasta erau “platforme” ideale de testare a aeronavelor, singurele “suprafete” ce puteau fi utilizate pentru decolare si aterizare.
Aici au testat si produs sub licenta, in general, hidroavioane si biplane de mici dimensiuni, mare parte a asamblarii finale facandu-se in aer liber, precum: VL D-27 Haukka; VL Saaski; Koolhoven FK.31, si altele. Strategii finlandezi erau constienti de faptul ca fabrica era vulnerabila in fata unui atac sovietic si inadecvata productiei de aeronave, astfel ca in anul 1930 aceasta s-a mutat la Tampere, pe-atunci cel mai mare oras industrial din Finlanda. Din 1936, VL a avut si ea sediul la Harmala, in apropiere de Tampere. Aici, chiar daca riscul bombardarii fabricii in urma unui potential atac sovietic era mai ridicat, au fost produse sub licenta aeronave de vanatoare, antrenament, recunoastere si bombardament, precum: JU-88; Bristol Blenheim; Fokker C.X/D. XXI; Blackburn Rippon; De Haviland Moth; Gloster Hamecock.
Cu toate acestea, productia de aeronave era pe planul trei, aici efectuandu-se reparatii si revizii pentru aeronavele din dotarea Fortelor Aeriene Finlandeze. Oricum, pe timpul razboiului, facilitatile de productie au fost dispersate in toata tara in vederea protejarii acestora, la Kokkola –fabrica de motoare, Kylmakoski –fabrica de prelucrare a lemnului, Viiala, Pori, Kolho si Pirkkala –alte ateliere de productie piese si subansamble. In anul 1932, Kaario absolvise cursul de inginerie mecanica in cadrul Universitatii Tehnologice din Helsinki. In decembrie 1932, imediat dupa absolvire, a fost trimis la specializare in domeniul constructiei de motoare aeronautice la Universitatea Charlotttenburg din Berlin, Germania). Intors la inceputul lui 1939 din Germania, Kaario impreuna cu doi colegi, ajunge prin transfer la fabrica din Siuro, unde s-a ocupat de motoare de aeronave si testarea acestora.

Surface Soarer Prototype
Aici, avea posibilitatea sa-si transpuna visul in practica, si anume, dezvoltarea unui vehicul care sa se deplaseze prin utilizarea “efectului de sol”. Interesant este faptul ca Kaario incepuse sa proiecteze inca din 1931 un mic astfel de vehicul pe perna de aer (Hovercraft/ACV/Air Cushion Vehicle), numit Pintaliitajaprototyypin/Surface Soarer Prototype/Planor de Suprafata, in acea vreme acesta indeplinind functia de inspector sef la Valtion Lentokonetehdas/VL, obtinand brevetele finlandeze cu numarul 18630 si 26122, pentru primul vehicul functional cu efect de sol. Cu toate ca era un vehicul revolutionar, inventia lui Kaario n-a atras atentia armatei finlandeze si, bineanteles, nici fonduri suficiente necesare dezvoltarii proiectului, insa, cu toate acestea, el a mers mai departe cu dezvoltarea acestui proiect, realizand cel de-al doilea prototip numit Patosiipi Nr.2, pe care la si testat cu succes pe gheata in ianuarie 1935 (acest vehicul era capabil sa se ridice de la sol, insa nu era capabil sa planeze pe distante lungi). A continuat sa-si dezvolte teoriile legate de utilizarea efectului de sol, construind mai multe modele pentru teste suplimentare. In 1936 a realizat un vehicul apropiat de designul hovercraft-urilor de astazi, avand celebra “fusta” si turbosuflante de aer, propulsat de un motor de motocicleta Harley-Davidson in 2 cilindri, testat intai pe pamant dupa care pe apa, vehiculul dovedindu-se a fi lent dar cu capacitate buna de planare.
Patosiipi Nr.2
Asa cum mentionam anterior, Kaario revine in Finlanda din Germania la inceputul anului 1939, si incepe imediat testarea de noi modele, culminand cu Patosiipi Nr.8, prototip substantial imbunatatit, ce dispunea de un motor Porsche de 53 CP, testat pentru prima data pe aeroportul din Harmala si-apoi pe apa, la Siuro. Acest prototip nu s-a dovedit pe masura asteptarilor, inregistrandu-se vibratii puternice la deplasarea pe teren accidentat, neputand trece peste obstacole mai mari de 20 cm (inclusiv valuri), putand duce maxim doi pasageri la viteza de 80 km/h.
Dar, asa cum s-antamplat de multe ori in istoria inventiilor, uneori norocul iti iese in cale cand nici nu te-astepti! Asa i s-a intamplat si lui Kaario…Fara a avea stiinta despre prezenta pe aeroportul Harmala a vreunui oficial din conducerea Illmavoimat/Finnish Air Force/Fortele Aeriene Finlandeze in timpul testarii Patosiipi Nr.8, Kaario a atras atentia factorilor militari. Intamplator, in zona se aflau insusi generalul-maior Arne Sakari Somersalo (seful Illmavoimat) si generalul-maior Vaino Lahja Rikhard Valve (seful Merivoimat/Finnish Navy/Marina Finlandeza, ministrul al apararii intre anii 1944-1945).
Cei doi generali au asistat intamplator evolutia Patosiipi Nr.8, acestia fiind surprinsi si intrigati de evolutia acestuia, incepand sa puna intrebari de genul ce este, ce poate face si cine-l dezvolta. A fost un noroc neasteptat pentru Kaario si echipa sa ce lucrau la prototip voluntar, in afara orelor de program, fara niciun ban. Astfel, doua zile mai tarziu, lui Kaario si echipei sale li s-a cerut o demonstratie cu acest vehicul in fata sefilor Illmavoimat si Merivoimat si a unui grup de ofiteri tehnici specialisti ai celor doua structuri (interesant este faptul ca acesti specialisti n-aveau uniforme si grade, fiind imbracati in civil. Exista supozitii ca printre acestia se aflau si ofiteri germani). Profitand de ocazia neasteptata, Kaario a prezentat asistentei toate conceptele si ideile sale, unele definite pe cand se afla la specializare in Germania, precum ambarcatiuni destinate transportului de trupe pe Marea Baltica, vedete rapide si torpiloare, toate acestea bazate pe efectul de sol, capabile sa duca o tona incarcatura la viteze de 100-120 km/h. Impresionat de demonstratie si de ideile absolut revolutionare ale lui Kaario, generalul Vaino Valve i-a cerut acestuia ca impreuna cu echipa sa sa dezvolte conceptul Pintaliitaja intr-o arma militara viabila in termen de 12 luni, alocandu-i resursele necesare. Aceste nave, vedete torpiloare rapide si puitoare de mine, urmau sa devina parte a Merivoimat in Marea Baltica, marind capacitatea de riposta in fata Marinei Sovietice.
Nu mult dupa aceea, a aparut si primul prototip, numit P-9 (Pintaliitaja-9), ce avea un design foarte simplu, forma alungita formata din doua corpuri tip catamaran realizate din lemn, propulsia fiind asigurata de trei motoare de aeronave, de tip Mercury, doua dispuse orizontal in corpul ambarcatiunii, cel de-al treilea fiind plasat sus in pupa acesteia pe un pilon demontabil cu patru lonjeroane. Motoarele dispuse orizontal aveau rolul de a asigura perna de aer necesara plutirii, cel de-al treilea motor, cel de pe pilonul demontabil, asigura deplasarea. Acest vehicul a fost testat timp de 10 zile, rulajul pe apa implicand functionarea simultana a tuturor motoarelor, acestea efectuandu-se atat pe vreme buna cat si pe vreme rea, pe apa, pe uscat sau in zone mlastinoase, atingandu-se viteze de 120-130 km/h.
Interesant este faptul ca in Marea Baltica (primavara lui 1939) ambarcatiunea a fost testata (sustin sursele finlandeze si nu numai) avand piturate stele rosii in partile laterale si inscriptia „CCCP” (URSS), asta in vederea derutarii curiosilor, stiut fiind faptul ca si sovieticii testau in acea perioada astfel de vehicule, ambarcatiuni realizate de catre inginerul Vladimir Levkov (aici lucrurile sunt neclare. Surse rusesti afirma ca aceste ambarcatiuni erau, de fapt, cele realizate de catre Levkov, fiind vorba despre P-9/10/11, testate inainte de izbucnirea WW II. Conform marii majoritati a expertilor, sovieticii/rusii au dreptate, aceste ambarcatiuni le apartin. Sa vedem insa povestea…). Se spera ca P-9 sa fie confundata cu cele testate de catre sovietici.

P-10, iulie 1939
Oricum, testele au fost considerate satisfacatoare de catre Merivoimat, considerandu-se oportuna dezvoltarea a doua variante a acestei ambarcatiuni, o vedeta torpiloare si un transportor de trupe (nava de desant). In acest sens au fost alocate rapid fonduri de urgenta, acordandu-i-se proiectului prioritate maxima, comandandu-se trei prototipuri ce urmau a fi gata pana la sfarsitul verii lui 1939. P-10 (Pintaliitaja -10) a fost prototipul numarul 2 (proiectat in doar 4 saptamani, echipa lucrand cate 16 ore pe zi) aparut la mijlocul lunii iulie 1939, testat in paralel cu P-9, a fost mai reusit si cu performante imbunatatite. Concluziile trase cu acest prototip si cu P-9 au dus la realizarea P-11 (Pintaliitaja-11) construit din duraluminiu, ce urma sa aiba doua variante, vedeta torpiloare de mare viteza si nava de desant trupe, construita la sfarsitul verii lui 1939. P-11 avea design simplificat, cabina de pilotaj in zona centrala a navei (pilot, mecanic si operatorul radio), in spatele careia se afla compartimentul destinat militarilor transportati (varianta de desant trupe).
Ambarcatiunea in varianta de atac dispunea de doua turele la prova si la pupa, una echipata cu mitraliere (binate, calibrul 12,70 mm), cealalta cu un tun AA de calibrul 20 mm (Hispano-Suiza), doua tuburi lans-torpile (cate unul pe fiecare parte a cabinei de pilotaj), foarte probabil sa dispuna si de 8 grenade anti-submarin. Nava urma sa aiba urmatoarele performante: greutate: 8,60-11,30 tone; echipaj 7 oameni; lungime 24 m; latime 5,40 m; motor: 2 Hispano-Suiza de cate 1000 CP fiecare; viteza maxima de aproximativ 160 km/h (pe apa). Urma a intra in productie incepand cu noiembrie 1939, in ambele variante, Merivoimat comandand 21 de exemplare (foarte probabil). Controlul directiei se realiza cu ajutorul a doua aripioare dispuse la partea dorsala a ambarcatiunii, de mari dimensiuni.
Nava era, cel putin teoretic, capabila sa evolueze pe nisip, teren mlastinos, pe gheata si mare agitata, insa era instabila la viteze mari. Oricum, la izbucnirea Razboiului de Iarna cu sovieticii, P-11 se pare ca a fost utilizata in operatiuni militare, insa avea deficiente grave, precum patrunderea apei de mare in carburatoare si supraincalzirea motoarelor la viteze mari. Mai mult decat atat, vizibilitatea la viteze mari era scazuta datorita pulverizarii apei de mare de catre puternicele motoare, iar capacitatea de a vira la viteze mari era scazuta si putea duce la rasturnare dar, cu toate acestea, Merivoimat n-avea nimic in dotare comparabil cu aceste nave.
Kaario si echipa sa nu s-au descurajat, lucrand cel putin 16 ore pe zi la remedierea deficientelor in cadrul fabricii de la Suomenlinna, devenita intre timp cea de a doua lor casa. A rezultat o barca revizuita, mai lunga, la care popmarea de aer sub coca permitea producerea unei „perne de aer” mai eficiente, capabila sa sustina greutatea ambarcatiunii si bineanteles, planarea acesteia deasupra marii (efectul de sol). Noua ambarcatiune, numita P-12, avea urmatoarele caracteristici: lungime 45 m; latime 15 m; motoare: 4 Hispano-Suiza de cate 1000 CP fiecare; viteza maxima 160 km/h; armament: 4 tuburi lans-torpile, 4 turele dotate cu mitraliere de calibrul 12,70 mm (binate) si tunuri de calibrul 20 mm (binate).

L5, varianta sovietica in Golful Finlandei – 1937
Conform surselor finlandeze se pare ca in primavara lui 1940 cel putin 10 astfel de ambarcatiuni erau gata construite, insa informatia este incerta. Oricum, povestea hovercrafturilor finlandeze este interesanta dar incerta din punct de vedere istoric. Cel mai probabil Kaario n-a apucat sa-si construiasca ambarcatiunile, iar Merivoimat n-a asigurat fondurile necesare, basca atacul sovietic ce a pus capat proiectului. Mai mult decat atat, ambarcatiunile P-9/10/11/12, conform surselor rusesti, ar apartine lui Vladimir Levkov, inginer sovietic ce dezvolta ambarcatiuni similare de la inceputul anilor *30, precum L-5 ce atingea 130 km/h, proiecte intrerupte odata cu izbucnirea WW II si atacarea de catre germani a URSS. Personal inclin sa cred ca este vorba despre o confuzie, voita sau nu, ambarcatiunile descrise anterior fiind de fapt realizari sovietice de la mijlocul anilor *30, apartinand inginerului Vladimir Levkov (acesta a pornit de la cercetarile marelui savant Konstantin Tsiolkovsky, unul dintre parintii zborului in spatiu, ce publicase o lucrare pe aceasta tema –efectul de sol –inca din anul 1927).

L1 varianta sovietica, octombrie 1935
Prima ambarcatiune pe perna de aer dezvoltata de catre Levkov a fost L-1 din 1934. Sovieticii/rusii o considera ca fiind prima din lume, Levkov avand cam 20 de proiecte de nave pe perna de aer, aceste ambarcatiuni fiind descrise anterior (P-9/10/11/12, numite L-1/5 de catre sovietici). Un proiect interesant al lui Levkov, ramas doar la stadiu incipient, de macheta, a fost cel al unui tanc pe perna de aer, numit „Hovertank”, aparut in 1937. Acest vehicul urma sa aiba urmatoarele caracteristici: greutate 8,50 tone; lungime 10 m; echipaj 2; blindaj cuprins intre 10-13 mm; motor: doua motoare de avion M-25 de 1450 CP fiecare; viteza maxima 120 km/h; suspensie pe perna de aer, putand plana la inaltimea de 20-25 cm deasupra suprafetei. In sfarsit, proiecte…

Levkov L 1 in 1934
Oricum, fara niciun dubiu, sovieticilor le revine marele merit in realizarea primului ekranoplan/ecranoplan bazat pe efectul WIG, operational din lume. Este vorba despre echipa condusa de catre profesorul Rostislav Alexeev, din cadrul Central Hydrofoil Design Bureau/Biroul Central de Design Aripi Submarine din orasul Gorki (astazi, Nizhny Novgorod), infiintat inca din anul 1943, ce se ocupa cu cercetarea si proiectarea ambarcatiunilor cu aripi portante. Inca din 1947, Alexeyev a propus realizarea unei nave ce se putea deplasa cu ajutorul WIG generat de aripa joasa. Aparuse ideea a ceea ce sovieticii numeau “ekranoplan” (ambarcatiune ecran, termen inventat de catre Alexeyev), Alexeyev proiectand primul astfel de vehicul in 1960. Un an mai tarziu apare SM-1, prima vehicul bazat pe efectul WIG, nici avion nici ambarcatiune, ci o “corcitura” intre cele doua.

SM-1 numit initial “Model autopropulsat nr.1” conform unor surse, este primul astfel de vehicul experimental realizat de catre sovietici, acesta fiind destinat exclusiv testelor, primul zbor avand loc pe data de 22 iulie 1961. Testele s-au desfasurat, initial, cu lansare de pe catapulte speciale (ulterior si cu propulsie proprie), deasupra apei (doar pe mare linistita) sau a uscatului, vehiculul nefiind propulsat de motorul propriu, insa acestea au adus un plus valoros de cunoastere a fenomenului WIG si a designului propice unui astfel de vehicul. Aripile principale si secundare erau dispuse in tandem, designul lor deriva din cel al aripilor imersate, aripile principale avand in partile laterale cate un flotor.
La un astfel de test, de data aceasta prin propulsie proprie, a participat si viceprim-ministrul Dimitri Ustinov, presedintele comitetului militar-industrial (ulterior, Ministrul Apararii al URSS), care a fost impresionat de acest vehicul si de oportunitatile militare deschise de acesta, dandu-si acordul pentru dezvoltarea conceptului. Cu toate ca n-a fost tocmai un succes, viteza de decolare fiind prea mare iar planarea prea aproape de suprafata apei, ceea ce ducea la probleme de manevrabilitate (raza de virare fiind foarte mare, altfel ambarcatiunea lovea suprafata apei), inclusiv autonomia fiind scazuta, acest vehicul a marcat inceputul. Ulterior, s-a adoptat stabilizatorul in “T” ce nu este afectat de suprafata, permitand un zbor lin, solutie adoptata incepand cu SM-2, dupa ce SM-1 s-a prabusit accidental in timpul testelor in luna ianuarie 1962 (datorita cedarii motorului, echipajul s-a salvat).
SM-1 avea urmatoarele caracteristici: lungime 20 m; inaltimea cozii 3,15 m; anvergura cozii 3,70 m; greutate 2,80 tone; viteza: de decolare 170 km/h/maxima 270 km/h/de croaziera 250 km/h; echipaj 3 oameni dispusi in tandem; inaltime de planare deasupra suprafetei cuprinsa intre 50 cm-1 m; inaltimea maxima de planare deasupra apei 50 cm; propulsie: un turboreactor dispus pe piloni deasupra fuzelajului pupa, TS-12L (primul motor cu turbina dezvoltat de catre Oleksandr Heorhiovych Ivchenko incepand cu anul 1953), 900-1200 kgf; anvergura aripilor: coada 3,70 m/principale 4,50 m; latimea fuzelajului/carenei un metru; inaltimea fuzelajului/carenei 1,40m; pescaj 30 cm; inaltimea de planare deasupra suprafetei 50 cm; incarcatura pe aripa 105 kg/m patrat; anul aparitiei prototipului experimental, 1961; inaltimea fuzelajului/carenei 1,40m; latimea fuzelajului/carenei un metru.
Acest prototip a permis inginerilor sovietici sa creioneze caracteristicile operationale cheie ale acestor ambarcatiuni deosebite, precum: viteza operationala deasupra marii apropiata de cea dezvoltata de catre aeronave; navigabilitate excelenta si capabilitati amfibie (asemenea hidroavioanelor); semnatura radar scazuta; eficienta economica in operare; posibilitati largi de utilizare militara (debarcare si transport trupe sau marfuri, lansare rachete, patrulare, etc) ce se vor regasi in viitoarele Ekranoplane. Toate acestea au atras atentia Marinei Sovietice care, incepand cu anul 1962, a devenit principalul finantator al programului de dezvoltare si, bineanteles, principalul beneficiar al rezultatelor acestuia. Odata cu implicarea directa a Marinei in proiect, rezultatele au inceput sa vina in ritm alert, incepand cu prototipul SM-2.

Ecranoplan SM-2P
Interesant este faptul ca SM-2 incepuse sa fie construit in acelasi timp cu SM-1, fiind aproape identic cu acesta, dar avand o noua configuratie a cabinei si coada in „T”. Prototipul a fost revizuit, fiind cunoscut in inventare drept SM-2P. SM-2/SM-2P avea urmatoarele caracteristici: lungime 20 m; inaltimea cozii 3,40 m; greutate 3,20 tone; viteza: de decolare 160 km/h/maxima 270 km/h/de croaziera 250 km/h; echipaj 1-3 oameni; inaltime de planare deasupra suprafetei cuprinsa intre 50 cm-2 m; inaltimea maxima de planare deasupra apei 50 cm; propulsie: doua motoare cu reactie, Tumanski Soyuz RU 19-300 (turbina cu o singura treapta; compresor axial cu sapte trepte; diametrul maxim 55,20 cm; putere 7,96-8,83 Kn/883 daN; greutate 225-235 kg; lungime 1,73-1,81 m; debitul de aer 15,80-16 kg/s; intretinere la fiecare 100 de ore de functionare. A echipat ca turboreactor auxiliar aeronave precum: Yak-30/32; AN-24/26/30. A avut si o varianta modificata destinata aeronavelor civile, numita RU 19A-300), unul amplasat in interior, la baza cozii in „T”, avand gura de admisie a aerului la radacina cozii, iar celalalt in botul prototipului, fluxul de aer necesar functionarii motorului fiind asigurat printr-o serie de duze; anvergura aripilor: principale 5,25 m/coada 6,70 m; anul aparitiei prototipului experimental, 1962; inaltimea fuzelajului/carenei 1,50m; latimea fuzelajului/carenei 90 cm; pescaj 40 cm.
In acelasi an, 1962, avea s-apara SM-3, ce avea design revizuit si urmatoarele caracteristici: lungime 14,50; inaltimea cozii 2,80 m; anvergura cozii 4,10 m; greutate 4,80 tone; viteza: de decolare 140 km/h/maxima 180 km/h/de croaziera 160 km/h; echipaj 1; inaltime de planare deasupra suprafetei cuprinsa intre 50 cm-2 m; inaltimea maxima de planare deasupra apei 50 cm; propulsie: un motor cu reactie, RU 19-300 dispus in botul ambarcatiunii/aeronavei, debitul de aer fiind asigurat prin intermediul unor duze aflate pe suprafata interioara a sectiunii bordului de atac al aripii. Acest design a cauzat neajunsuri precum instabilitate oscilatorie laterala; anvergura aripilor: coada 4,10 m/principale 3,80; latimea fuzelajului/carenei 90 cm; inaltimea fuzelajului/carenei 1,30m; pescaj 30 cm.
Anul urmator, 1963, a aparut SM-2P7, o continuare a cercetarilor pentru realizarea ecranoplanului functional tot-teren (sa-i zicem asa, mai “pa rumanskii”), pe apa, gheata, teren accidentat, zapada afanata si nisip. Acest prototip deriva din SM-2, insa n-a fost o copie fidela a acestuia. SM-2P7 avea urmatoarele caracteristici: lungime 19,40 m; inaltimea cozii 3,50 m; anvergura cozii 8,50 m; greutate 6,30 tone; viteza: de decolare 140 km/h/maxima 270 km/h/de croaziera 250 km/h; echipaj 3 oameni; inaltime de planare deasupra suprafetei cuprinsa intre 50 cm-2,50 m; inaltimea maxima de planare deasupra apei un metru; propulsie: un motor cu reactie, Soyuz KR 7-300 (putere dezvoltata 21,10 kN/2151,60 kgf; greutate 380 kg; diametrul maxim 64,50 cm; lungime 2,01 m; debitul de aer 35 kg/s) dispus in botul ambarcatiunii/aeronavei, debitul de aer fiind asigurat prin intermediul unor duze aflate pe suprafata interioara a marginii aripii; anvergura aripilor: coada 8,50 m/principale 9,40 m; latimea fuzelajului/carenei 90 cm; inaltimea fuzelajului/carenei 1,60m; pescaj 40 cm. Acest prototip a fost testat in zbor pe mare agitate cu valuri de 40 cm inaltime, viteza de decolare fiind de 150 km/h dupa un rulaj de 600-800 m, ceea ce este absolut remarcabil.
A fost testat si in conditii de iarna si diferite profiluri de zbor cu rezultate foarte bune, caracteristicile de stabilitate aerodinamica imbunatatindu-se substantial. In paralel cu SM-2P7 s-a testat si prototipul experimental SM-4. Acesta era in mare parte asemanator cu 2P7, dar avea doua carlingi dispuse in tandem, cea din fata fiind ocupata de catre un om de stiinta si echipamentele sale de control, SM-4 fiind destinat exclusiv cercetarilor. Dealtfel, pe acest prototip experimental sau definitivat caracteristicile aripii, a cozii si configuratia aerodinamica ideala a unui astfel de vehicul. SM-4 avea urmatoarele caracteristici: lungime 20 m; inaltimea cozii 3,60 m; anvergura cozii 7,30 m; greutate 4,80 tone; viteza: de decolare 140 km/h/maxima 230 km/h/de croaziera 200 km/h; echipaj 2 oameni (pilot si cercetator); inaltime de planare deasupra suprafetei cuprinsa intre 50 cm-2,50 m; inaltimea maxima de planare deasupra apei 70 cm; propulsie: doua motoare cu reactie, unul de tip Soyuz KR 7-300 (dispus la prova) iar celalalt, de tip RU 19-300 (dispus la pupa); anvergura aripilor: coada 7,30 m/principale 7,50 m; latimea fuzelajului/carenei 90 cm; inaltimea fuzelajului/carenei 1,96 m; pescaj 50 cm.

SM-4 s-a dovedit incurajator pentru biroul de proiectare al lui Alexeev, ceea ce a dus la proiectarea unui WIG de mari dimensiuni, numit mai tarziu KM. Pana atunci au mai aparut SM-5, acesta avand o configuratie asemanatoare cu SM-4, dar era propulsat de doua turboreactoare KR 7-300 si avea greutatea la decolare crescuta la 7,30 tone, dar avea sa fie distrus intr-un accident produs in anul 1964, pilotul pierzandu-si viata (pe vant puternic, ambarcatiunea a inceput sa castige in inaltime. Pilotul, in loc sa reduca viteza a marit-o, castigand si mai multa altitudine insa, acest fapt a dus la pierderea anvelopei de zbor si prabusire, ambarcatiunea-avion dezintegrandu-se la contactul dur cu apa). SM-5 avea urmatoarele caracteristici: lungime 18 m; latime 90 cm; inaltime 1,52 m; greutate 7,30 tone; viteza maxima 300 km/h; inaltimea de planare deasupra suprafetei 1,20 m; propulsie: doua motoare cu reactie, RU-19-300; anvergura 19,40 m; echipaj 2 oameni. I-au urmat mai multe modele experimentale dezvoltate in perioada 1963-1968, cu imbunatatiri relevante de design (inclusiv un sistem automat de control dezvoltat de catre Institutul Elektropribor din Leningrad, ce se va regasi in variante modernizate pe marile ecranoplane), precum SM-6, SM-8 si KM, ce vor duce la marile Ekranoplane, vedetele articolului de fata.
WW
Episodul LXXIII: Ecranoplanul – Ultima Parte
SURSE DATE SI POZE: Wikipedia-Enciclopedia Libera, Internet.
www.avionslegendaires.net/…/alekseyev-a-90–o…
www.fas.org/man/dod-101/sys/ship/…/903.htm
www.militaryfactory.com/aircraft/detail.asp?..
www.globalaircraft.org/planes/lun_ekranoplan.pl
archive.today/Ty1YS
the-things-with-wings.blogspot.com/…/seaplane…
survincity.com/…/first-russian-wig-wig-experim…
www.deagel.com/Turboprop…/AI-24_a001769..
www.redstar.gr/Foto…/Ekranoplan/Ut_1.html
www.lesliefield.com/…/alexander_graham_bell…
forums.sjgames.com › Roleplaying › GURPS
www.harpoondatabases.com/…/Entry1285.aspx
www.foils.org/gallery/forlani.htm
www.rusgate.fi/…/kaspianmeren-hirvioille-suun…
www.flightforum.fi/forum/index.php?…
tampub.uta.fi/bitstream/…/gradu01659.pdf?…1
fas.org/man/dod-101/sys/ship/row/…/903.htm
www.russiadefence.net/t2956-soviet-air-cushio…
ram-home.com/ram-old/sm-1alekseev.html
www.amntksoyuz.ru/en/engines/airengines/last/