
DARPA este nașa și moașa primei nave fără echipaj a US Navy – Sea Hunter, parte a programului ACTUV (Anti Submarine Warfare – ASW – Continuous Trail Unmanned Vehicle). Programul iși propune să exploreze capabilitatea US Navy de a avea misiuni având o durată de mai multe luni (până la 3 luni), fără echipaj la bordul navelor și cu control uman minim, fiind în acest moment o platformă de dezvoltare pentru tehnologie.
Conform DARPA, scopurile principale sunt:
- Să demonstreze potențialul unei platforme concepută din start fără echipaj
- Redefinește constrângerile care se aplică navelor
- Să producă o navă care să depășească orice altă nava cu echipaj și rol asemănător din punct de vedere al performanțelor cu costuri cât mai mici
- Să dezvolte tehnologia necesară navelor fără echipaj
- Să permită navelor să execute misiuni pe durata câtorva luni, pe distanțe de mii de kilometri, cu un control minim
- Să se supuna regulilor internaționale de navigație și să aibă interacțiuni autonome cu un adversar inteligent
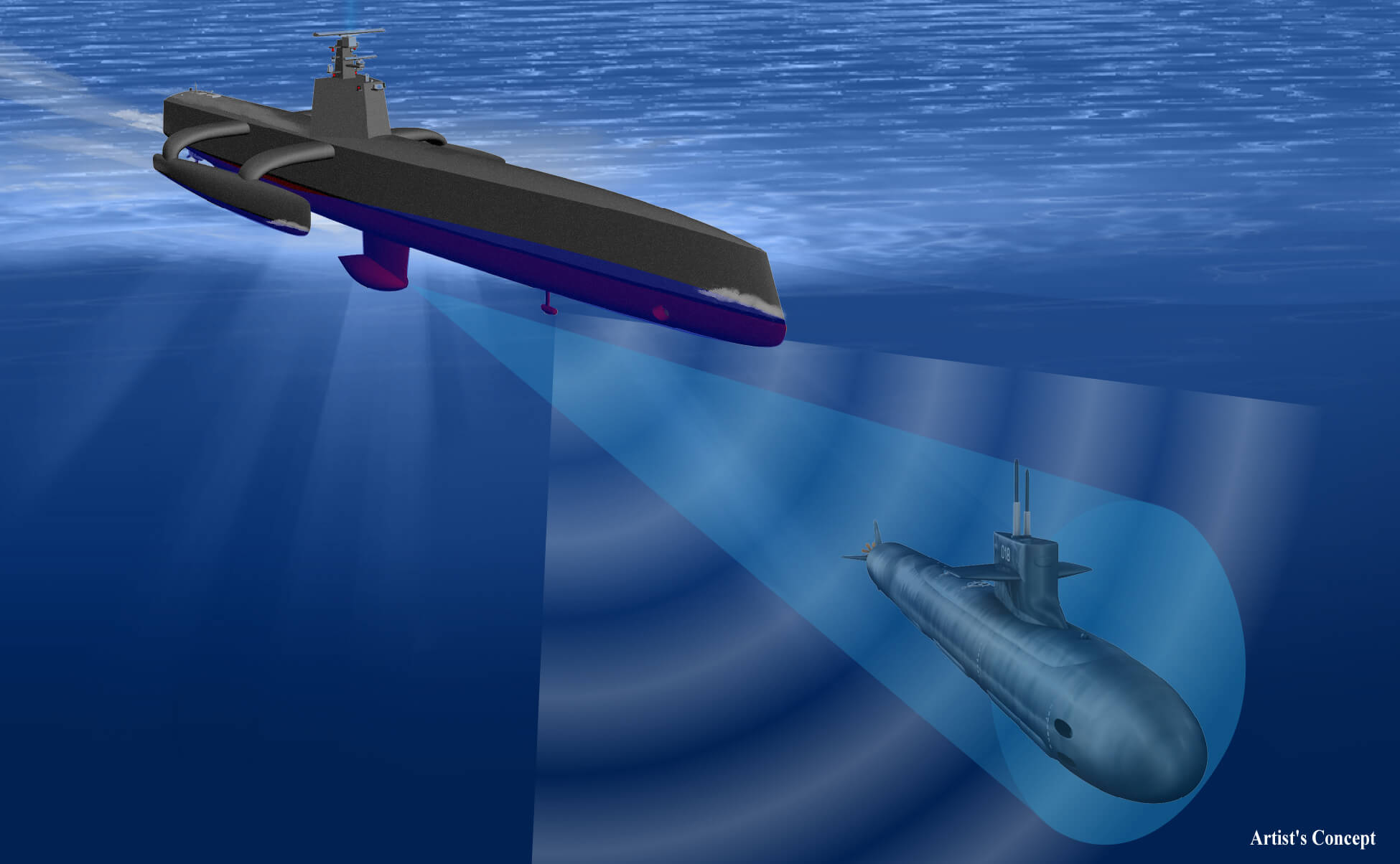
- Să demonstreze capabilitatea unei nave de a folosi senzorii pentru a urmări continuu cele mai silențioase submarine, pe durata indelungată
Două filme de propagandă (primul este semnat de DARPA) pentru ACTUV:


Programul ACTUV a fost lansat în 2010. În noiembrie 2012 DARPA a ales compania Leidos pentru proiectare, construcție și teste, contractul fiind de 59 M$. Cele patru faze ale contractului sunt proiectul inițial (faza 1), proiectul final și planificarea producției (faza 2), construcția (faza 3) și testele efectuate de DARPA si US Navy (faza 4). Construcția a început în iulie 2014, fiind efectuată în paralel cu dezvoltarea și testarea sistemului de navigație autonomă.






Un video cu un timelapse al construcției Sea Hunter:

Nava a fost lansată la începutul lui 2016 și luna aceasta – aprilie 2016 – a fost botezată Sea Hunter, după efectuarea primelor teste pe râul Columbia.
Un film cu testele de manevrabilitate și viteză:

Alte imagini de la ceremonie. Ignorați pișcotarii; concentrați-vă pe navă.

The autonomous ship „Sea Hunter”, developed by DARPA, is shown docked in Portland, Oregon after its christening ceremony April 7, 2016. REUTERS/Steve Dipaola
Navele ACTUV sunt dedicate luptei antisubmarin, submarinele diesel-electrice fiind relativ ieftine și din ce în ce mai des întâlnite in flotele țărilor mici, având semnături acustice tot mai reduse (de exemplu submarinele suedeze din clasa Gatland). Noile submarine pot folosi apele puțin adânci din apropierea coastei și litoralul pentru a se adăposti cu succes. Un număr suficient de mare de asemenea submarine reprezintă o problemă pentru orice flotă. Un alt scop al programului este să contracareze dezvoltarea tehnologiei submarine a Federației Ruse (era sa scriu URSS) si Chinei, acestea fiind văzute ca o amenințare tot mai mare pentru portavioanele US Navy în Pacific. Deși – declarativ – nava este destinată detectării submarinelor cu propulsie clasică, referințele la nivelul de zgomot redus arată că nu au fost lăsate pe dinafară nici submarinele nucleare.






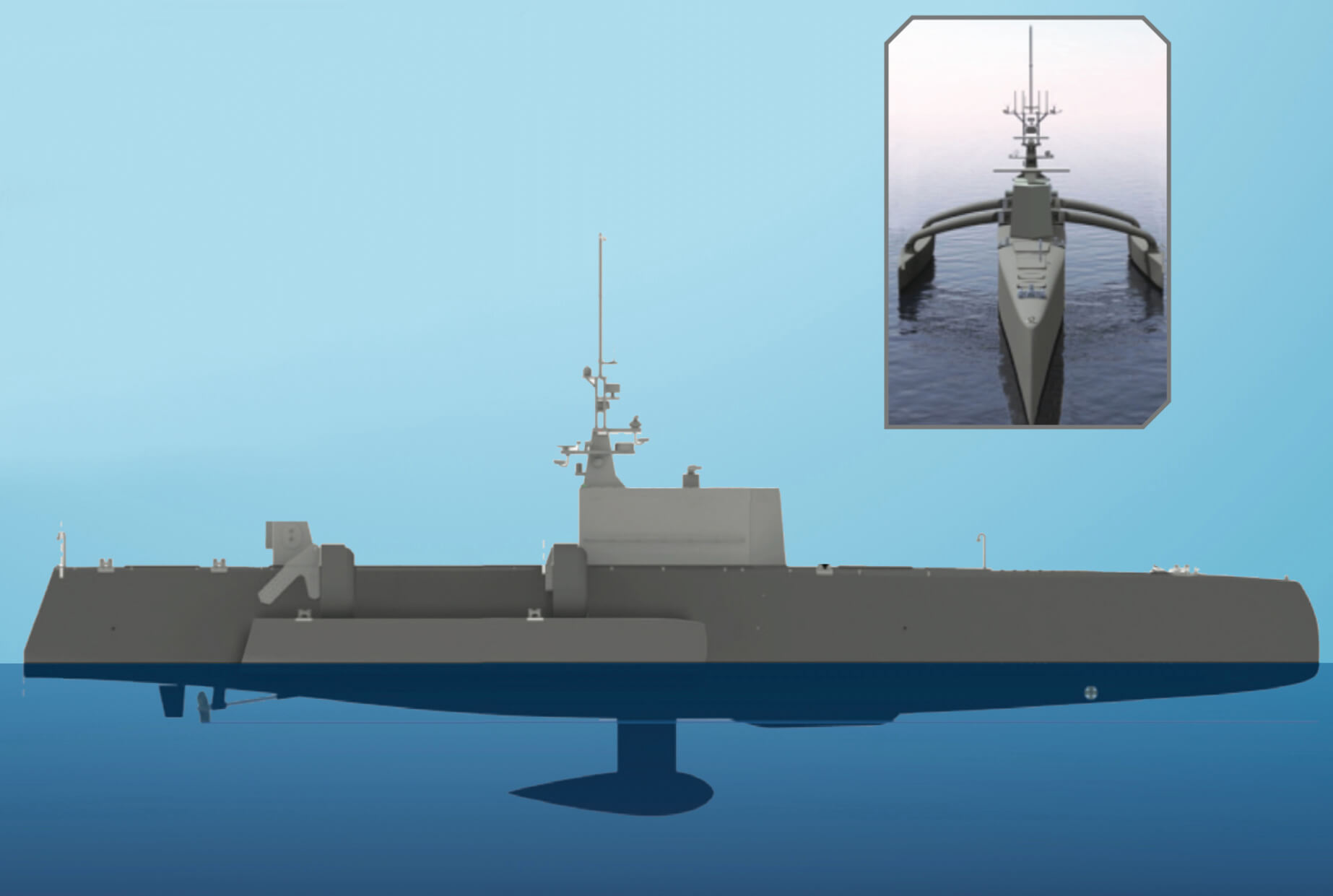
Sea Hunter este un trimaran cu lungimea de 40 de metri realizat din materiale compozite, are o greutate de 140-145 de tone și are două grupuri propulsoare diesel care îi asigură o viteză maximă de 27 de noduri. Poate naviga 10000 de mile (marine) fără realimentare, cu o viteză de croazieră de 12 noduri pentru o perioada de 60-90 de zile (alte surse dau o rază de acțiune de 4000 de mile). Se zice ca e in elementul ei în condiții cu mare de gradul 5, vânt de 21 de noduri și valuri de 2 metri și că se descurcă pe mare de gradul 7 cu valuri de 6 metri.



Poate naviga în climate ecuatoriale și reci, hardware-ul și software-ul permițând navigarea în zone cu trafic mare, ziua și noaptea, pe orice condiții meteo. Testele software au demonstrat respectarea legislației și convențiilor maritime, inclusiv COLREGS (International Regulations for Preventing Collisions at Sea) publicat de IMO (International Maritime Organization), folosind pentru navigație radar, camere video si GPS. Evident, aceasta a fost până acum cea mai mare provocare. Sea Hunter poate fi pilotată de la distanță sau poate acționa doar cu un control minim (sparse remote supervisory control model).

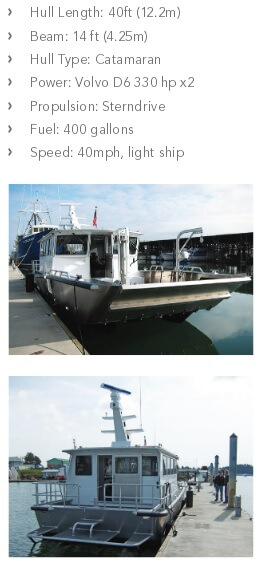
Pentru dezvoltare și testarea sistemului de navigație a fost folosită o navă surogat – Pathfinder. Aceasta – în unul din teste (zice-se că în testul final) – a navigat autonom între Gulfport și Pascagoula (Mississippi) în ianuarie 2015 pe o distanță de 35 de mile. În dezvoltarea sistemelor de navigare autonomă au fost implicate și NASA JPL (Jet Propulsion Lab) împreună cu CMU (Carnegie Mellon University).

Înainte de testele cu Pathfinder, sistemul a fost testat cu aproximativ 26000 de simulări. În total, testele reale au însumat 42 de zile de navigație si 101 teste, cu diverse scenarii implicând nave reale, navigație pe canale cu zone periculoase si trafic; în toate situațiile sistemul autonom a condus nava păstrând o distanță de minim 1 km față de o altă navă. Următoarele teste au implicat mai multe nave în mai multe scenarii sau comportament agresiv al navelor întâlnite.

Sistemul de navigație de pe Pathfinder a avut în timpul voiajului de 35 de mile doar o hartă a zonei unde urma să aibă loc testul, restul informațiilor necesare navigației fiind obținute de la sisteme radar standard, COTS (Commercial Off-The-Shelf). Pathfinder a evitat toate obstacolele, balizele, coasta și alte nave din zonă, totul fără waypoints sau intervenție umană.
Radar-ul este folosit pentru 90% din informațiile utilizate, însă clasificarea navelor și diferențierea – de exemplu – între un velier și o navă cu motor se face folosind echipamentele optice. DARPA a căutat specific pe piață (printr-un RFI) tehnologii (hardware, software, senzori) pentru a depinde cât mai puțin de radar în procesul de detecție și urmărire a navelor și altor pericole care pot apărea în timpul navigației. Toți senzorii și unitățile de procesare trimit informații sistemului autonom de navigație, acesta luând deciziile de navigație.

Are două sisteme radar – unul pentru distanță scurtă și altul pentru distanță lungă. Pe lângă radar, camere stereoscopice, sisteme electro-optice și camere în infraroșu asigură observarea mediului pe timp de zi și noapte, iar un sonar activ-pasiv este folosit pentru identificarea țintelor. La senzorii standard pot fi adaugate module specifice misiunilor.
Pentru pasionați, sonarul este de generatia a cincea, botezat Modular Scalable Sonar System (MS3) și a fost dezvoltat de un subcontractor obscur – Raytheon. Poate efectua căutare și urmărire activă și pasivă, poate detecta torpile și să găsească diverse obstacole mici pentru a asigura o navigație sigură. Evident, este un sistem modular, care asigură upgrade-uri viitoare în funcție de noile tehnologii care devin disponibile.

Sonarul pasiv este amplasat pe chila și folosește frecvențe medii (5-15 kHz), iar ce cel activ frecvențe înalte (20-30 kHz). Evident, calculatoarele Sea Hunter analizează sunetele și le clasifică automat. Sistemele automate pot, de asemenea, să facă o predicție a acțiunilor țintei, după ce a fost identificată.
US Navy se așteaptă la un cost de operare mult mai mic decât în cazul soluțiilor actuale, cu o componentă umană redusă. Pretul este estimat că va fi de 20 M$ (Sea Hunter fiind construit cu aproximativ 23 M$), costul de operare fiind de 15-20 k$ zilnic (un distrugător convențional costând 700 k$ zilnic).
Sea Hunter nu este limitat doar la proprii senzori, putând comunica prin satelit sau direct cu alte nave, avioane sau baze terestre.
Anul acesta (2016) urmează să înceapă evaluarea capabilităților navei și teste cu diverse module pentru misiuni, testele fiind planificate pentru următorii doi ani. Se vor testa capabilitatea de a opera pe mare, în condiții reale, urmărindu-se să se determine dacă Sea Hunter respectă normele internaționale de navigație. Una dintre destinațiile vehiculate este Japonia, pentru a se alătura în teste flotei a șaptea staționată acolo.

ACTUV concept
În 2018 este planificat ca această navă să devină operațională în US Navy, începând misiunile antisubmarin. Pentagonii iau în calcul să o folosească și pentru deminare, nefiind primul vehicul fără echipaj folosit în acest scop. Cum în cazul unui conflict navele ACTUV vor vânate de submarine, este posibil ca în viitor sa existe un număr mare de asemenea nave.
Programul ACTUV se supune ‘Third Offset Strategy’ a DoD (‘offset strategy’ se referă la noile tehnologii care pot da US avantaje în fața adversarilor), care are ca priorități:
- Sisteme autonome și robotică: sisteme capabile să evalueze situațiile și să ia decizii autonom, fără intervenție umană;
- Miniaturizare: obținută prin eliminarea echipajului din sistem;
- Big data: agregarea de volume mari de date, filtrare și procesare automată înainte de a fi prezentate operatorilor;
- Tehnologii avansate de fabricație: folosirea materialelor compozite si a tipăririi 3D au ca avantaje imediate o fabricare mai rapidă.
Ei bine, prima grijă a oponenților tehnologiilor autonome a fost dacă va avea sau nu și arme la bord. DoD nu exclude posibilitatea, subliniind – ca de obicei – că totdeauna decizia de folosire a armelor va fi a unui om.
Iulian
Surse:
- Foto: interweb & Reuters
- Informatii: interweb, URL mai jos
http://www.reuters.com/article/us-usa-military-robot-ship-idUSKCN0X42I4
http://sputniknews.com/military/20160411/1037798221/us-sea-hunter.html
http://www.naval-technology.com/projects/sea-hunter-asw-continuous-trail-unmanned-vessel-actuv
http://www.naval-technology.com/news/newsdarpa-christens-us-navys-first-actuv-as-sea-hunter-4860036/
http://www.auvsi.org/hamptonroads/blogs/auvsi-news/2015/01/29/leidosactuv
http://www.leidos.com
https://www.leidos.com/sites/default/files/files/Autonomous%20Surrogate%20Vessal%20Fact%20Sheet.pdf
http://www.navaldrones.com/ACTUV.html
https://www.fbo.gov/index?s=opportunity&mode=form&id=7daee76fe46aea23ae9e2d19ab2ef4b5&tab=core&_cview=0
http://www.lynceans.org/all-posts/large-autonomous-vessels-will-revolutionize-the-u-s-navy/
http://foxtrotalpha.jalopnik.com/darpas-unmanned-submarine-stalker-could-change-naval-wa-1695566032
https://en.wikipedia.org/wiki/Beaufort_scale
https://en.wikipedia.org/wiki/International_Regulations_for_Preventing_Collisions_at_Sea
Notă: link-urile de pe Wikipedia sunt excelente doar ca sinteze și rezumate și pot fi puternic influențate de părerile autorilor.