TERN (Tactically Exploited Reconnaissance Node)
Multă vreme m-am întrebat dacă există cineva care este plătit de DoD pentru a găsi acronimele acestea. Dacă cineva știe mai multe, vă rog, lămuriți-mă și pe mine.
În martie 2013 – un an prolific se pare – DARPA a lansat si programul TERN după ce au privit noile conflicte. Și, din nou, harta (98% din uscat se află la 900 de mile marine de coastă). Așa că Darpii au tras concluzia că mai nou este nevoie continuu de capabilități ISR (Intelligence, Surveillance and Reconnaissance) și de a ajunge la anumite ținte. Elicopterele au o rază de acțiune mică, avioanele (UAV sau nu) au nevoie de portavion sau o bază militară. Și costă.

Dorința lor este de a avea nave mai mici pe care să le utilizeze ca platforme mobile de lansare și recuperare pentru UAV din categoria MALE (Medium-Altitude Long-Endurance). Astfel capacitățile UAV de pe nave vor fi disponibile on-demand fără modificări ale navelor, acestea (navele) având capacitatea de a efectua misiuni deasupra uscatului sau apei, cu un singur sistem, la distanțe mari.

Programul are trei faze – primele două fiind dedicate proiectării și testării preliminare, în timp ce a treia este dedicata implementării unui sistem funcțional care va fi testat la sol și pe o navă și se întinde pe 40 de luni. La finalul lui 2015, în decembrie, au anunțat că pentru faza a treia o firmă de apartament (Northrop Grumman) va conduce echipa aleasă pentru a construi avionul. Echipa va avea în componență o altă firmă de apartament (Aerovironment).

În cifre, avionul ar trebui să aibă o rază de acțiune de 600-900 de mile nautice (1110-1660 km), o capacitate de transport de 270 de kg iar sistemul de lansare și recuperare trebuie să încapă pe navele din clasa LCS-2. Au ales varianta VTOL (Vertical Take-Off and Landing) și va avea două elice contrarotative și un fuselaj de tip aripă zburătoare. Seamănă puțin cu Convair XFY-1 Pogo, demonstrat cu succes în anii ‘50, însă neprodus în serie deoarece nu avea suficiente baterii, beculețe și nici wow factor (în comparație cu avioanele cu reacție).

Convair XFY-1 Pogo
Oricum, US Navy și-au dorit aceste capabilități din al doilea război mondial, însă primele zboruri ale elicopterelor le-au luat ochii și mințile, fiind platforma pe care au folosit-o pe nave până acum.
Provocările identificate de DARPA au fost:
- Dezvoltarea unei tehnici de lansare și recuperare care să permita operarea chiar și pentru avioane mai mari de pe nave mici.
- Proiectarea unui avion cu capabilități asemănătoare cu cele ale avioanelor curente (capacitate de transport, rază de acțiune, rezistență), capabil să opereze în mediu maritim.
- Pentru utilizarea sistemului modificările aduse navelor să fie minime și reversibile iar întreținerea și operarea să aibă personal minim.
- Păsăroaia și restul sistemelor să aibă loc la bordul navelor, unde spațiul disponibil este redus.
În demonstrația navală UAV va decola, va trece la zbor orizontal și apoi va ateriza pe puntea unui distrugător (din clasa Arleigh Burke). Vor avea, astfel, pentru navele US Navy posibilitatea de a obține informații mai repede și mai bine, să ajungă mai departe, sunt dezvoltate tehnologii de autonomie supravegheată și se ajunge în final la o forță navală distribuită și neagregată.
Să nu uit: DARPA i-a luat în proiect și pe cei de la ONR (Office of Naval Research) al US Navy în 2014.
TALONS (Towed Airborne Lift of Naval Systems)
Buun. Despre asta nu știu ce să spun. Tot Darpii s-au gândit că navele nu au un catarg suficient de înalt pe cît și-ar dori, așa că nu ar strica o extensie. Deci au plecat la drum și lucrează la o parapantă complet automată. Permite creșterea distanței până la care poate comunica o navă și crește capacitatea de a observa mediul. Remorcată de o navă, TALONS poate avea senzori și echipamente SIR și de comunicații cu o greutate de maxim 70 de kg, ridicându-se la înălțimea de 150-450 de metri.

TALONS Concept
Au fost efectuate pe uscat mai mult de 20 de zboruri cu succes, în condiții diverse (fără sau cu vânt de diverse intensități), așa că în septembrie 2015 au fost realizate și testele pe mare.
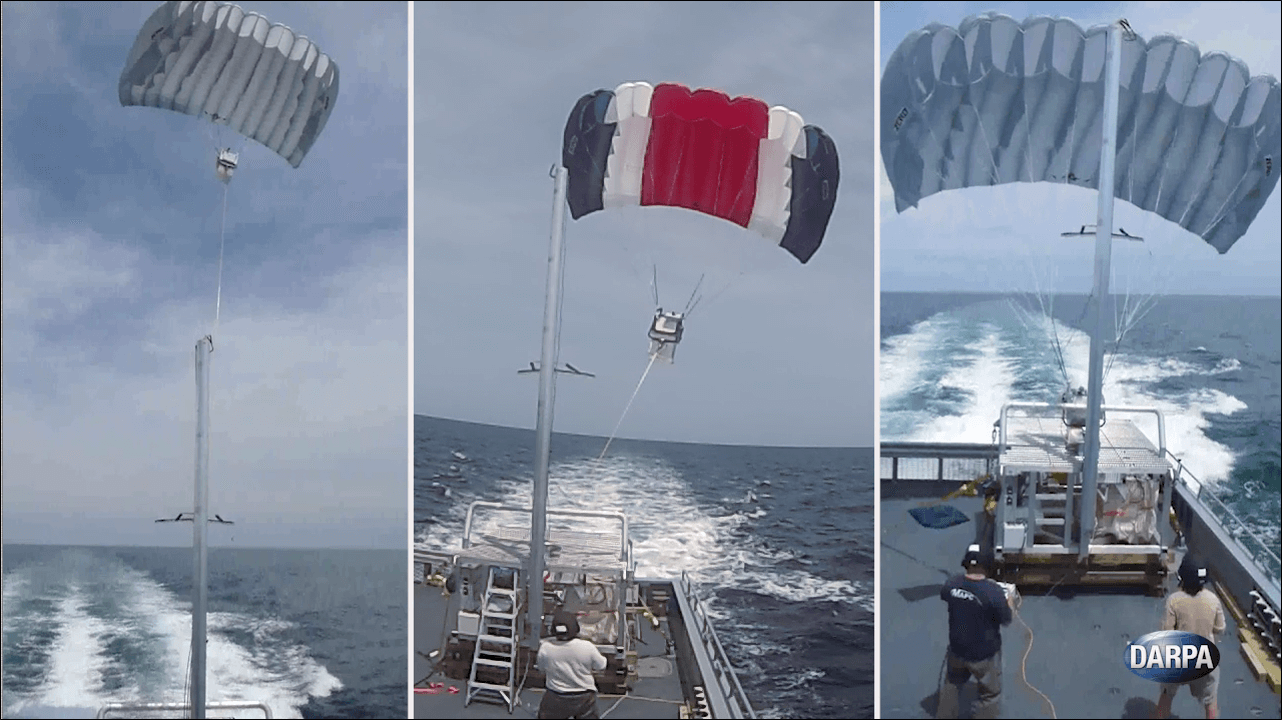
TALONS
Si un film, pentru doritori:

Se pare că Talons a fost parte a fazei 1 a TERN.
Totuși, parapantă?
MOCCA (Mobile Offboard Clandestine Communications and Approach)
Cu MOCCA, DARPA exploreaza capacitatea unui UUV dotat cu un sonar activ de a coopera cu un submarin. Scopul este dezvoltarea tehnologiilor pentru sonare bistatice și pentru comunicații subacvatice sigure, scopul fiind ASW.
Sonarul tradițional – activ – este, evident, foarte bun. Însă are o mică problemă: folosirea lui îl dă de gol pe cel care îl folosește. Sonarul pasiv are avantajul că doar ascultând sunetele navelor și altor submarine, păstrează secretă prezența submarinului, însă nu este la fel de eficient ca cel activ.

Mocca
Sonarul bistatic aduce submarinelor părțile bune ale ambelor tehnologii. Emițătorul este pe un UUV, iar receptorul pe submarin. Atâta vreme cât submarinul știe poziția exactă a UUV, poate detecta prezența submarinelor inamice și le poate urmări la fel de eficient ca sonarul clasic.
Companiile care participă la program vor dezvolta vehiculul UUV, tehnologia de comunicații cu el, surse active pentru sonar, procesarea semnalelor.
Cum dimensiunile emițătorului sunt critice, DARPA se așteaptă la dezvoltarea de noi materiale și un proiect cu eficiență energetică maximă. UUV ar trebui să aibă un diametru maxim de 21 de inci (ghici ciuperca de ce).
Deoarece mediul în care va opera este cel cu ape puțin adânci, sunetul transmis de emițător se va reflecta de fund, existând posibilitatea să dea de gol submarinul, astfel încât primul pas va fi studiul exact al caracteristicilor zonei în care sistemul va fi folosit. De asemenea, comunicațiile intre UUV și submarin trebuie sa nu dea de gol poziția submarinului, să asigure controlul UUV, să nu poată fi interceptate și să fie robustă.
Început în ianuarie, proiectul ar trebui să aibă mai mult de 4 ani și 3 faze, însă continuarea lui va fi decisă dupa încheierea primei faze în care vor fi dezvoltate proiectele sonarului și tehnologiilor de comunicații și vor fi realizate prototipurile subsistemelor.
În continuare avem o relație ierarhică destul de importantă, plină de acronime. Mai exact: DARPA a lansat DASH care a produs TRAPS și SHARK și care pare a conține și DSOP (Deep Sea Operations).
DASH (Distributed Agile Submarine Hunting)
Și au stat ei și s-au uitat la ceea ce se întâmplă și apoi și-au spus că noile submarine silențioase sunt o mare problemă (asimetrică) din punct de vedere al costului relativ mic, numărului mare și armamentului utilizat – totul comparat cu submarinele legacy ale US Navy. Așa că a apărut și răspunsul: DASH, programul Darpilor prin care își propun să dezvolte tehnologiile și sistemele care să inverseze situația prin dezvoltarea senzorilor care să funcționeze nesupravegheați.
Programul va avea noduri aflate de adâncime mare (aceasta oferind și posibilitatea de a supraveghea o suprafață mai mare pe lânga nivelele mici de zgomot existente la acele adâncimi) asemănătoare sateliților – neoficial numite sabullites. Pe lângă nodurile de adâncime mare, pentru zonele aflate la adâncimi mici va fi dezvoltata o soluție cu senzori mobili, însă aceștia vor efectua supraveghere neacustică, de deasupra.
În urma programului au fost dezvoltate două prototipuri:
- TRAPS (Transformational Reliable Acoustic Path System) este un sonar pasiv, proiectat să supravegheze o suprafață mare, de la adâncime, fiind amplasat pe platformă.
- SHARK (Submarine Hold at RisK) este un UUV proiectat să conțină un sonar activ pentru a urmări submarinele după detecția originală.

TRAPS este un nod SWaP (low-size, weight and power) care transmite informațiile prin intermediul unei legături wireless acustice către un nod aflat la suprafață. Acesta, la rândul lui, transmite datele mai departe printr-o legătură RF prin satelit.
Modelul matematic bazat pe capacitatea de recepție din punct de vedere al direcției și sensibilității spune că nodurile TRAPS pot acoperi o suprafață mare cu un număr mic de unități. Una din provocări a fost păstrarea sistemului redus ca mărime și complexitate, câștigănd ca flexibilitate și capacitate de detecție prin legarea lor în rețea. Evident, sunt folosite în dezvoltare componente COTS.
SHARK este a doua componentă a sistemului – un sonar activ mobil – și a efectuat testele inițiale de adâncime în februarie 2013, scufundându-se până la 4450 de metri, timp de 11 ore în teste care au durat 6 zile. De asemenea, și TRAPS a fost testat cu succes.


În demonstrația sistemului, TRAPS și SHARK au lucrat împreună pentru a demonstra capabilitățile.
Legătura cu DSOP este faptul că DSOP își propune sa utilizeze zona de la adâncimi mai mari de 1000 de metri pentru operațiuni de detecție și comunicații pe distanță mare. Această zonă de mare adâncime – deep sound channel – conține apă rece, nivelul de zgomot este redus iar viteza sunetului este cea mai mică.
În aceste zone condițiile sunt asemănătoare cu ghidurile de undă, sunetul de frecvență joasă putând ajunge la mii (?) de mile marine.
Tehnologiile dezvoltate pentru acest proiect includ senzori de adâncime mare, rețea distribuită și reconfigurabilă de noduri, un proiect al unei nave care sa opereze la adâncime mare, un sistem nou de propulsie, un sistem acustic de transmisie și recepție de putere mare, un sistem transportabil de recuperare, transport și lansare.
Produsul final va folosi senzorii pentru a urmări submarinele, aceștia trebuind să se adapteze mobilității navelor de suprafață, să poată fi reconfigurat pentru a fi folosit și la alte misiuni, medii sau la intervale mari în timp. Unul din punctele cheie este managementul energetic, pentru a opera în condiții dificile perioade lungi de timp.
În legătură cu comunicațiile efectuate cu baliza aflată la suprafață, DARPA a recunoscut ca este o posibilitate ca acestea să fie compromise, însă potențialul pe care îl are soluția merită asumarea riscurilor.
Evident, nu există informații publice despre autonomia SHARK sau modalitatea de lansare a lor.
Iulian
Foto: interweb
Informatii: interwebs; URL:
http://www.darpa.mil/program/tactically-exploited-reconnaissance-node
http://www.darpa.mil/news-events/2013-03-01
http://www.darpa.mil/news-events/2015-12-28
http://airandspace.si.edu/collections/artifact.cfm?object=nasm_A19730274000
https://www.flightglobal.com/news/articles/darpa-advances-ship-based-male-uav-concept-404737/
http://www.unmannedsystemstechnology.com/2015/12/darpa-announces-phase-3-of-tern-unmanned-vtol-aircraft-project/
http://www.unmannedsystemstechnology.com/2015/05/darpas-low-cost-tech-improve-uas-capabilities-sea/
http://www.darpa.mil/news-events/2015-09-24
http://www.janes.com/article/58003/darpa-looks-to-develop-uuv-sonar-communications-packages-for-submarine-offboard-operations
http://www.militaryaerospace.com/articles/2016/01/darpa-bistatic-sonar.html
http://www.darpa.mil/program/distributed-agile-submarine-hunting
http://www.darpa.mil/news-events/2013-04-03
http://www.militaryaerospace.com/articles/2013/04/Bluefin-sonar-UUV.html
http://www.naval-technology.com/news/newsbluefin-conducts-deep-water-testing-uuv-darpa
http://www.naval-technology.com/news/newsbluefin-to-support-darpas-dsop-phase-ii-programme
http://www.bluefinrobotics.com/media/press/bluefin-completes-deep-testing-of-darpa-uuv/
https://www.wired.com/2013/04/darpa-subs/
http://www.darpa.mil/NewsEvents/Releases/2013/04/03.aspx