În urmă cu o lună, în martie 2016, Boeing a prezentat Echo Voyager. Este al treilea membru al familiei ‘Echo’, după Echo Seeker și Echo Ranger – evident, cu caracteristici diferite. Nicăieri la Boeing nu scrie DARPA, dar lansarea mi-a dat o idee: să văd ce face DARPA pentru mări și oceane.
Acest articol are două părți care își propun să prezinte tehnologiile aflate în studiu peste ocean, aplicabile în produse care se vor găsi în viitor pe piață.
Hydra
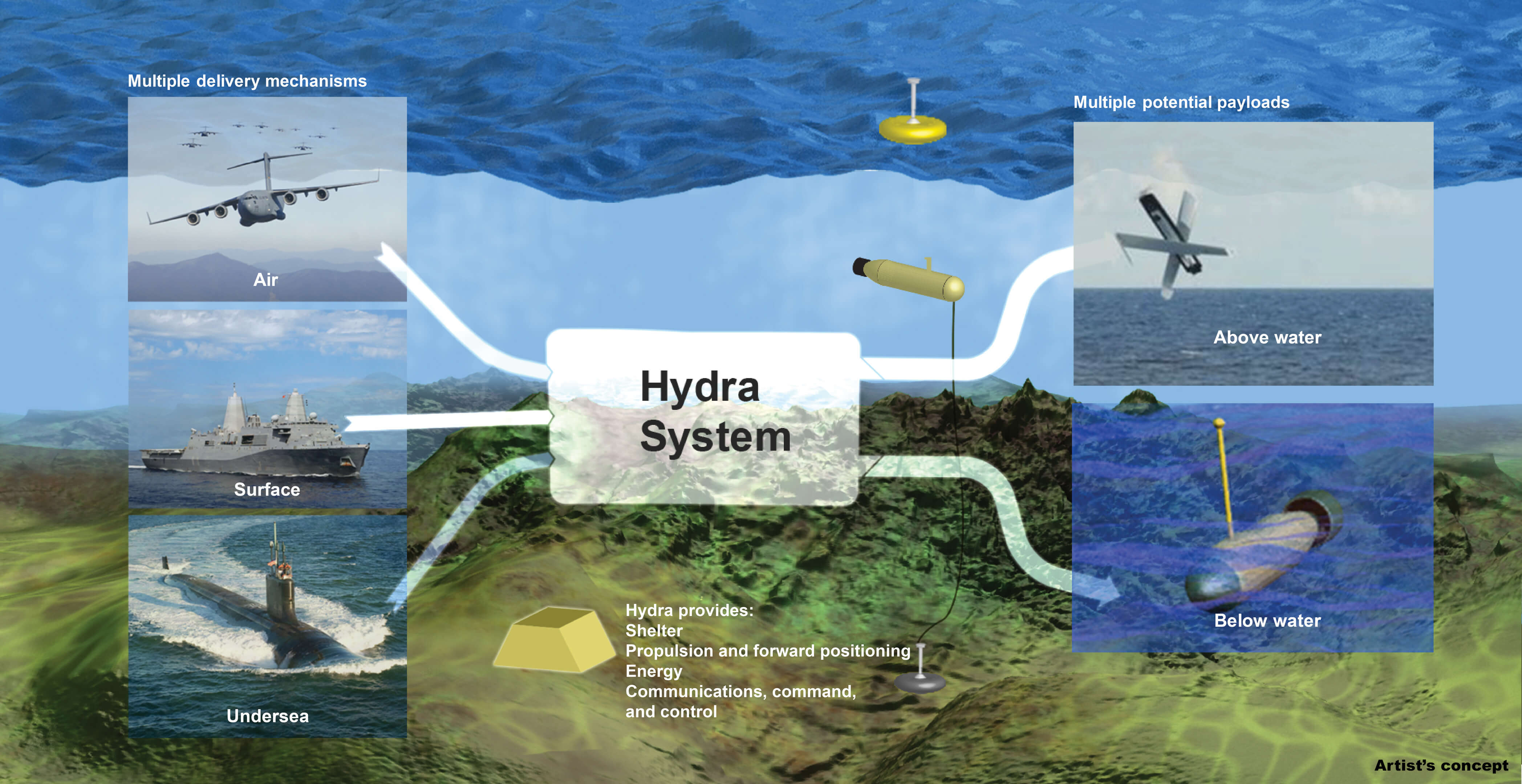
Creatură mitologică în Grecia, dă numele unei inițiative lansată în august 2013. Evident, scopul declarat este de a oferi suport pentru viitoare operațiuni în zone în care apărarea este suficient de puternică sau cu piraterie în floare. Așa că Darpii s-au gândit la un sistem subacvatic capabil să lanseze cu costuri mici vehicule aeriene și subacvatice dintr-o zonă cât mai apropiată de teatrul de operațiuni. Hydra ar trebui sa folosească module standard cu diverse încărcături, aflate într-un container. Lansarea containerului (nava mamă) să se faca din aer, de pe suprafața apei sau subacvatic. În cadrul programului Hydra se va vace demonstrația acestor vehicule și a tehnologiilor folosite.
Hydra
Pe scurt, un vehicul autonom, fără echipaj, burdușit cu drone aeriene și subacvatice, capabil să se deplaseze unde e nevoie de el. Varianta lungă, pentru cei cu chef de citit și curiozitate, mai jos.
Programul are trei faze: în faza 1 definirea conceptelor și dezvoltarea componentelor, urmând ca în fazele următoare să se încheie dezvoltarea și să fie testate componentele într-un sistem stabil, funcțional, cu demonstrații practice.
Zonele de care este interesată DARPA sunt:
- Containerul pentru componentele Hydra, agnostic, putând fi folosit cu orice încărcătură, în funcție de misiune și care să ofere servicii pentru conținutul lui (ex: comunicații, energie). Trebuie sa stea timp lung în apropierea coastei. Componentele ar trebui să includă: cutia propriu-zisă, sistemul de comunicații, sursa de energie, sistemul pentru balast, sistemul de propulsie. Capabilitățile dorite: să își poată schimba poziția, să poată naviga autonom, să efectueze singur operațiunile de lansare a încărcăturii.
- UAV lansat dintr-un modul aflat în containerul standard. Hydra va oferi comunicații, energie, și stabilitatea necesară lansării. Modulul va conține, proteja, inițializa și lansa UAV-ul. Vehiculul va fi lansat din modul, se va ridica la suprafață, va zbura o distanță X și va efectua o misiune Y.
- UUV lansat dintr-un modul aflat în containerul standard. Însă aceste vehicule să poată reveni la containerul principal, să poată descărca informațiile adunate care să fie apoi transmise la ‘centru’. Bateriile UUV să fie reîncărcate de vehiculul mamă.
- Sistemele de comunicații, comandă și control și integrarea Hydra în infrastructura existentă.
- Surse de energie noi pe care sa le utilizeze sistemul, dată fiind durata mare a misiunilor.
Detaliile referitoare la capabilitățile și misiunile dronelor sunt secrete.
Se pare că măgăreața dezvoltării UUV din Hydra a căzut pe Boeing, care încearcă diverse soluții de integrare.
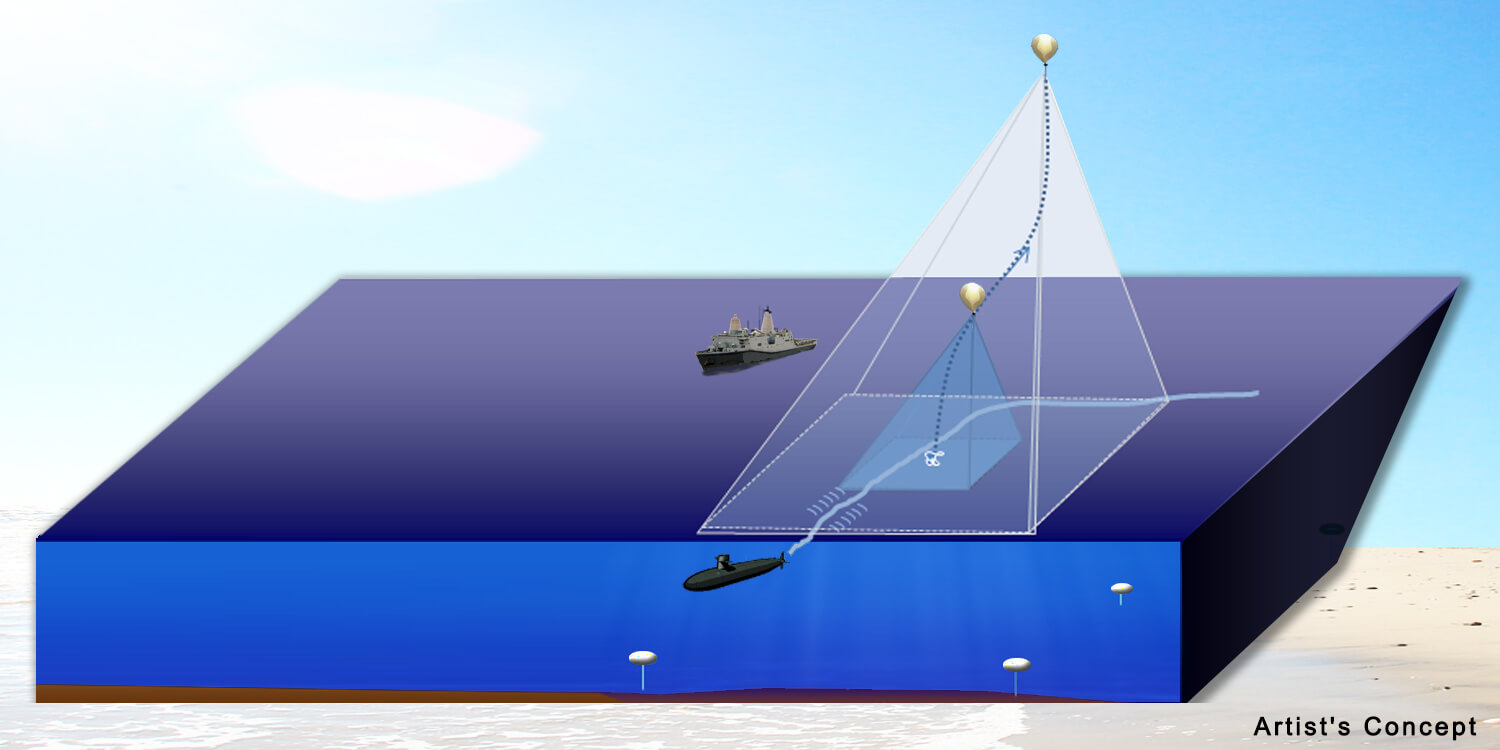
UFP (Upward Falling Payloads)
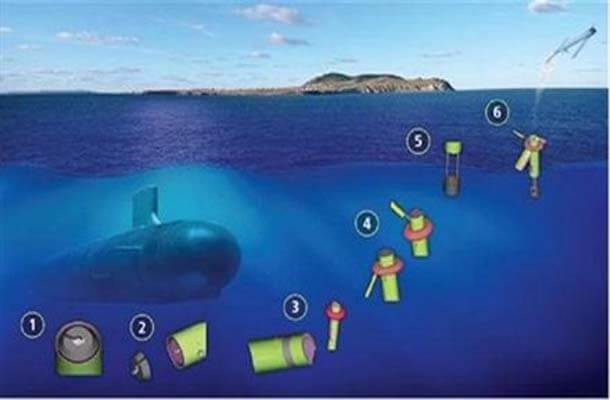
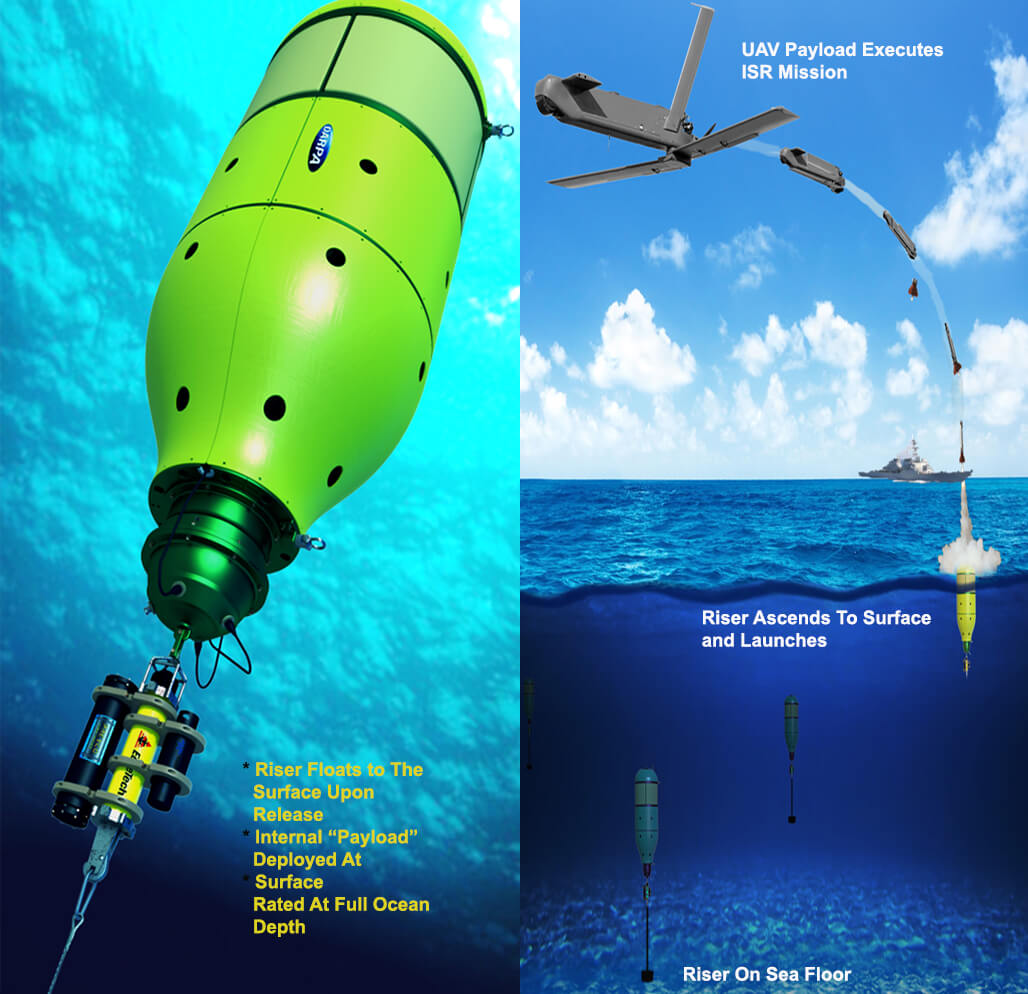
Am stabilit – cred – că DARPA crede că a avea ochi si urechi peste tot este o strategie bună. Beneficiarii tehnologiei (armata și marina) vor să le aibă la dispoziție când este nevoie, cu un cost cât mai mic; a le avea și a nu le putea folosi la momentul oportun duce întreaga situație pe terenul teoretic. Așa că odata cu Hydra, în ianuarie 2013, s-au apucat de UFP. Cred că totul a început cu o hartă a lumii și cineva care s-a gândit ‘Ui muică ce de Jie’, privind suprafața acoperită de apă. ‘Ce loc bun să ascundem ceva acolo.’ Adică un sistem distribuit, care să stea chiar și ani de zile pe fundul oceanului, în containere speciale. În momentul în care este novoie, nodul este activat de la distanță și se ridică la suprafață.

Sistemul are trei părți: încărcătura, containerul și sistemul de comunicații care declanșează ridicarea containerului.
Sistemul care va fi folosit pentru demonstrație trebuie să facă următoarele:
- Să reziste ani la presiuni mari (50% dintre oceane au o adâncime de peste 4000 de metri)
- Să primească corect comenzile de activare și să le execute
- Să se ridice rapid prin apă și să activeze încărcătura
Programul are trei faze:
- Faza 1 conține evaluarea proiectelor și studiile pentru a determina cele mai bune soluții pentru cele 3 puncte de mai sus.
- Pentru faza 2 se dezvoltă și se testează componentele sistemelor de comunicații și ridicare, împreună cu două UAV și un zmeu. Da, zmeu.
- Faza 3 conține demonstrații reale ale sistemelor integrate, cu produsele și tehnologiile dezvoltate în primele două faze.
Posibilele utilizări sunt: observare tactică, rețele de comunicații, electronic warfare, misiuni de salvare. DARPA spune că nu vor fi fi platforme pentru arme.
Faza a doua începea în martie 2014 iar testele finale sunt planificate pentru primăvara lui 2017.
Blue Wolf
Orice vehicul autonom are nevoie de o sursă de energie. La suprafață este mai usor: lumina și oxigenul sunt la îndemână. Însă sub apă situația se complică, lumina fiind puțină, oxigenul la fel. Așa că chiar dacă sunt avantajate de mediu, UUV (Unmanned Underwater Vehicles) au dimensiunile și greutatea determinate de vehiculele (nave sau submarine) care le lansează și recuperează. Raza de acțiune este determinată direct de energia disponibilă pentru propulsie si puterea necesară menținerii unei viteze constante.
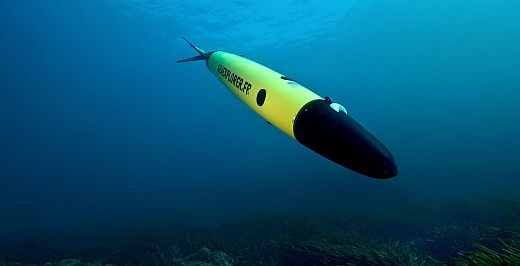
Blue Wolf își propune dezvoltarea unui UUV care să păstreze dimensiunile celor actuale, crescând viteza și raza acțiune considerabil. Tehnologiile care vor rezulta sunt cele de stocare și producere a energiei (termală, electrochimică, harvesting cu cel puțin două surse) și de reducere a frecării (prin materiale aplicate la suprafața UUV, diverse elemente hidrodinamice, forma corpului).
Testele finale urmează să fie realizate cu UUV existente deja în inventarul US Navy.
Programul a început în vara lui 2014, și la finalul lui 2015 s-au alăturat doi contractori obișnuiți pentru DARPA – Boeing și Lockheed Martin. UUV folosit pentru dezvoltare are un diametru de 21 de inci (533 mm – sună cunoscut?), propulsie electrică și control electric al suprafețelor de control.
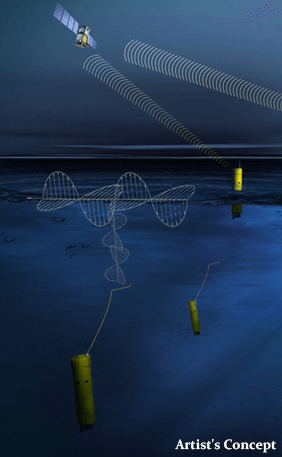
POSYDON (Positioning System for Deep Ocean Navigation)
‘La riftul continental Est-African virați la dreapta’. Este ceea ce vor auzi șoferii submarinelor in viitorul nu foarte îndeprtat dacă planurile DARPA vor deveni realitate. Am reusit, am scris un titlu de știre de jurnalism românesc! Sublim.

Undele radio, la frecvența folosită de GPS, nu pot trece prin apă. Astfel, orice submarin sau UUV trebuie să iasă periodic la suprafață, chiar și numai pentru a afla poziția exactă, dacă nu să își sincronizeze ceasul. 🙂 Navigația este apoi preluată de sistemele inerțiale, însă în timp acestea au erori din ce în ce mai mari (drift), astfel încât o nouă ieșire la suprafață este necesară pentru a obține din nou poziția exactă.
Evident, ieșirile la suprafață le fac vulnerabile.
POSYDON este un program ce își propune sa dezvolte un sistem care să fie echivalentul GPS pentru navigarea subacvatică, un sistem mai bun, mai sigur și mai precis decât navigarea inerțială pentru UUV. Ar trebui sa ofere global informații de poziționare și navigare subacvatică, să aiba semnale de timp (asemenea GPS) și să fie robust.
Planul este de a instala pe fundul oceanului câteva surse acustice. Măsurând distanța până la acestea, o platformă submarină (UUV sau submarin clasic) poate ști continuu poziția exactă, fără a mai fi nevoie de GPS.
Evident, unul din scopuri este financiar: eliminarea unităților IMU și a senzorilor de viteză duce la scăderea prețului unui UUV.
Tehnologia ar trebui să ofere poziționare exactă în oceane, mări, de-a lungul coastei și chiar în porturi. Și totul cu imunitate la bruiaj și la tentativele de a opri folosirea sistemului.
Evident, fiind vorba de mediu acvatic soluția aleasă este cea acustică, insă dificultățile sunt date de recepția multiplă a semnalului cu diverse întârzieri datorită reflexiilor multiple, efectul Doppler datorat navelor aflate în mișcare și lățimea de bandă limitată a semnalelor transmise.
Lucrul a inceput în aprilie 2015, proiectul fiind planificat pe o durată de patru ani și are trei faze. Faza 1 se concentrează pe procesarea semnalelor și modelarea oceanului – 12 luni, faza 2 își propune dezvoltarea și demonstrarea practică a tehnologiei pentru a determina în mediu natural distanța – 18 luni. Faza 3 are ca scop demonstrația cu un sistem funcțional.
Iulian
Surse:
http://www.boeing.com/features/2016/03/bds-echo-voyager-03-16.pagehttps://www.fbo.gov/utils/view?id=f528af06320aac71486e160e073c1c3chttp://www.darpa.mil/program/hydrahttp://www.darpa.mil/news-events/2013-08-22ahttp://auvac.org/community-information/community-news/view/2847http://www.darpa.mil/program/upward-falling-payloadshttp://www.darpa.mil/news-events/2013-01-11http://www.darpa.mil/news-events/2014-03-26http://www.darpa.mil/program/blue-wolfhttp://www.militaryaerospace.com/articles/2014/07/darpa-blue-wolf.htmlhttp://www.militaryaerospace.com/articles/2015/08/undersea-vehicles-blue-wolf.htmlhttp://www.militaryaerospace.com/articles/2015/10/military-undersea-vehicles.htmlhttp://www.militaryaerospace.com/articles/2015/04/darpa-underwater-navigation.htmlhttp://www.darpa.mil/program/positioning-system-for-deep-ocean-navigationhttps://defensesystems.com/articles/2015/04/24/darpa-posydon-undersea-gps.aspxhttp://www.darpa.mil/program/tactically-exploited-reconnaissance-nodehttp://www.darpa.mil/news-events/2013-03-01http://www.darpa.mil/news-events/2015-12-28http://airandspace.si.edu/collections/artifact.cfm?object=nasm_A19730274000https://www.flightglobal.com/news/articles/darpa-advances-ship-based-male-uav-concept-404737/http://defense-update.com/20130304_darpa-considers-male-drones-to-support-future-naval-operations.htmlhttp://defense-update.com/20150324_tern-2.htmlhttp://defense-update.com/20130304_darpa-considers-male-drones-to-support-future-naval-operations.htmlhttp://www.unmannedsystemstechnology.com/2015/05/darpas-low-cost-tech-improve-uas-capabilities-sea/http://www.darpa.mil/news-events/2015-09-24