Apa este un excelent conductor al sunetului, mult mai bun decât aerul. Atenuarea sunetului prin absorbție și transformarea în alte forme de energie este realizat in funcție de frecvența undei sonore și de proprietățile apei (coeficientul de atenuare, x, din legea lui Beer, aplicat la sunet, unde Iz și Io sunt valorile actuale ale intensității sunetului, depinde de vâscozitatea apei și este invers proporțional cu frecvența sunetului și cu densitatea apei).
Viteza sunetului în apă este determinată de rădăcina pătrată a elasticității împărțită la densitatea apei. Deoarece apa este doar puțin compresibilă, are o valoare mare a elasticității și, prin urmare, conduce rapid sunetul. Deoarece atât elasticitatea, cât și densitatea apei de mare se modifică în funcție de temperatură, salinitate și presiune, la fel se întâmplă și cu viteza sunetului.
În oceane, viteza sunetului variază între 1.450 și 1.570 de metri pe secundă. Aceasta crește cu aproximativ 4,5 metri pe secundă pentru fiecare creștere de 1 °C a temperaturii și cu 1,3 metri pe secundă pentru fiecare creștere de 1 psu a salinității.
De asemenea, creșterea presiunii mărește viteza de propagare a sunetului cu aproximativ 1,7 metri pe secundă pentru o creștere a presiunii de 100 de metri în adâncime, ceea ce este egal cu aproximativ 10 bari sau 10 atmosfere.
Cele mai mari modificări ale temperaturii și salinității în funcție de adâncime, care afectează viteza sunetului, se înregistrează în apropierea suprafeței apei. Modificările vitezei sunetului în plan orizontal sunt de obicei ușoare, cu excepția zonelor în care există limite abrupte între straturile de apa cu proprietăți diferite.
Efectele salinității și ale temperaturii asupra vitezei sunetului sunt mai importante decât efectul presiunii în straturile superioare. În adâncul oceanului, salinitatea și temperatura se modifică mai puțin odată cu adâncimea, iar presiunea devine un factor cu o mai mare pondere.
În regiunile de diluție la suprafață, salinitatea crește odată cu adâncimea în apropierea suprafeței, în timp ce în zonele cu evaporare ridicată salinitatea scade odată cu adâncimea. Temperatura scade de obicei cu adâncimea și exercită în mod normal o influență mai mare asupra vitezei sunetului decât salinitatea în stratul de suprafață al oceanelor deschise. În cazul diluției la suprafață, efectele salinității și ale temperaturii asupra vitezei sunetului se opun reciproc, în timp ce în cazul evaporării, acestea se consolidează reciproc, determinând scăderea vitezei sunetului odată cu adâncimea. Sub straturile oceanice superioare, viteza sunetului crește odată cu adâncimea.
Dacă o undă sonoră se deplasează în unghi drept față de aceste straturi, așa cum se întâmplă în cazul sondajului de adâncime, nu are loc nicio refracție; cu toate acestea, viteza se modifică în mod continuu odată cu adâncimea, iar pentru a determina adâncimea apei trebuie să se utilizeze o viteză medie a sunetului pentru întreaga coloană de apă. Variațiile vitezei sunetului determină refracția undelor sonore atunci când acestea se deplasează oblic prin straturi de apă care au proprietăți diferite de salinitate și temperatură. Undele sonore care se deplasează în jos și se deplasează oblic față de straturile de apă se vor curba în sus atunci când viteza sunetului crește odată cu adâncimea și în jos atunci când viteza scade odată cu adâncimea. Această refracție a sunetului este importantă în detectarea prin sonar a submarinelor, deoarece calea reală a unei unde sonore trebuie cunoscută pentru a determina poziția unui submarin în raport cu emițătorul sunetului. Refracția produce, de asemenea, zone de umbră pe care undele sonore nu le penetrează din cauza curburii lor.
La adâncimi de aproximativ 1.000 de metri, presiunea devine un factor important: aceasta se combină cu temperatura și salinitatea pentru a produce o zonă de viteză minimă a sunetului. Această zonă a fost denumită canalul SOFAR (sound fixing and ranging). Dispersat pe orizontală și nu în trei direcții (tridimensional), sunetul este capabil să se deplaseze pe distanțe mari (depinde insa si frecventa acestuia, cunoscut fiind ca sunetele cu frecvente înalte sunt absorbite și transformate în căldură mai repede decât sunetele joase). Hidrofoanele coborâte la această adâncime la mulți kilometri de la originea sunetului sunt capabile să detecteze impulsul sonor. Diferența de timp de sosire a impulsului la posturi de ascultare separate poate fi utilizată pentru a triangula poziția sursei impulsului.
Densitatea apei de mare este in funcție de temperatură, salinitate și presiune ( nivelul marii – 0 masl si la presiune atmosferica (101.325 kPa) densitatea este de 1.02813 gr/cm3, iar la -1000 sub nivelul marii si o presiune hidrostatica de 9.81 MPa, salinitatea este de 1.03285 gr/m3
De asemenea, efectul presiunii poate fi neglijat în multe cazuri prin utilizarea temperaturii potențiale. Acești doi factori i-au determinat pe oceanografi să adopte o unitate de densitate numită sigma-t (σt). Această valoare se obține scăzând 1,0 din densitate și înmulțind restul cu 1.000. σt nu are unități de măsură și este o densitate prescurtată a apei de mare controlată doar de salinitate și temperatură. σt al apei de mare crește odată cu creșterea salinității și scăderea temperaturii. Relația dintre presiune și densitate este demonstrată prin observarea efectului presiunii asupra densității apei de mare la 35 psu și 0 °C.
Valorile crescânde ale densității demonstrează compresibilitatea apei de mare sub presiunile enorme prezente în adâncurile oceanului. Dacă apa de mare ar fi incompresibilă, fiecare centimetru cub de apă din coloana de apă s-ar dilata, iar valorile densității la toate adâncimile ar fi egale. Dacă presiunea medie care apare la o adâncime de 4.000 de metri ar fi cumva înlocuită cu presiunea medie care apare la 2.000 de metri, iar suprafața oceanelor ar rămâne constantă, s-ar produce o creștere medie a nivelului mării de aproximativ 36 de metri.
Temperatura de densitate maximă și punctul de îngheț al apei scad pe măsură ce se adaugă sare în apă, iar temperatura de densitate maximă scade mai rapid decât punctul de îngheț. La salinități mai mici de 24,7 psu, densitatea maximă este atinsă înainte de punctul de îngheț, în timp ce la salinități mai mari, mai tipice pentru oceanele deschise, densitatea maximă nu este niciodată atinsă în mod natural. Deoarece sarea este în mare parte exclusă din gheață în majoritatea cazurilor, salinitatea apei de sub gheață crește ușor, iar inversarea convectivă, care este determinată atât de sare, cât și de temperatură, continuă pe măsură ce se formează gheața de mare.
Procesele de suprafață care modifică temperatura și salinitatea apei de mare contribuie la procesul de antrenare a circulației pe verticala a apei oceanelor. Cunoscută sub numele de circulație termohalină, aceasta înlocuiește continuu apa de mare de la adâncime cu apă de la suprafață și înlocuiește încet apa de suprafață din alte părți cu apă care urcă de la adâncimi mai mari.
Un traductor de temperatura in varianta industriala, poate avea o acuratete destul de ridicata (eroare de sub 0.1% ), un traductor de presiune poate avea o eroare de 0.04% din valoarea masurata iar acuratetea (eroarea) de masurare a densitati poate fi de pana la ±0.0001 g/cm3.
Traductorii moderni pot masura (cu o acuratete mai mica insa) mai multe variabile: densitate si temperatura, vascozitate si temperatura, densitate si concentratie, etc.
Concluzia este ca densitatea apei, este necesara a fi cunoscuta nu doar pt a cunoaste flotabilitatea submarinului (si a torpilelor, rachetelor lansate din submersie sau pt eventuale UAS-uri) ci si pt a detecta eventual submarinele adverse (in cazul submarinelor cu propulsie nucleara ramane “o dara”de apa calda care a fost utilizata in procesul de racire).
Prin masuratori oceanografice periodice si sezoniere, se poate determina un trend al densitatii, salinitatii, temperaturii apei (mai ales in cazul marilor, care in principiu sunt limitate de tarm, si salinitatea este influentata sezonier de raurile si fluviile ce se devarsa in acea mare), astfel incat avand traductori cu erori mici se pot detecta variatiile marimilor fizico-chimice masurate.
Apa de mare are o compoziție ușor alcalină, pH-ul variind între 7,5 și 8,4 (cu tendinta de cresterea aciditati datorita poluarii). Apa de mare are in general urmatoarea compozitie (aceasta difera insa de-a lungul istoriei geologice a Terrei si de asemena difera functie de ocean sau mare, de adancime, curenti, distanta fata de tarm):
Oxigen – 86%
Hidrogen – 11%.
Clor – 2%.
Magneziu – 1%
Sodiu – 1%
Calciu – 0,04%.
Sulf – 0,1%
Potasiu – 0,04%.
Carbon – 0,003%
Brom – 0,007%
Concentrația gazelor dizolvate in apa de mare, variază în funcție de nivelul de salinitate și de temperatură. În apa de mare cu un nivel ridicat de salinitate (salinitatea medie este de 35% sau 35 gr/l) si în condiții de temperatură ridicată, cantitatea de gaze dizolvate va scădea. Acest lucru se datorează prezenței ionilor de sare care blochează mișcarea apei.
Un exemplu este dioxidul de carbon care poate reacționa cu apa pentru a crea bicarbonat și ioni de carbonat. Reacția chimică este următoarea:
CO2 + H2O -> HCO3(-) + H(+) + CO3(2-) + 2H(+)
Reacția de mai sus va determina nivelul pH-ului din apa de mare.
Un traductor care poate masura concomitent (in varianta industriala), pH-ul, REDOX si oxigenul dizolvat in apa, are o acuratete (eroare) de 0.1% din valoarea masurata.
Detectarea unui continut diferit fata de valoriile medii normale a dioxidului de carbon sau variatii ale pH-ului, poate conduce la detectarea unui submarin cu un sistem AIP ce se bazeaza pe un motor Stirling).
Coroborarea masurarii diferitilor parametrii ai apei, cu metodele mai mult sau mai putin clasice (sonare pasive, magnetometre pt determinarea anomaliilor magnetice, determinarea aparitiei termoclinelor cu laser, in urma deplasarii submarinelor in submersie, etc), permite detectarea mai facila a submarinelor.
Submarinele sovietice/rusesti au Systema Obnaruzhenya Kilvaternogo Sleda sau SOKS, pe cand britanicii au Non-Acoustic Sensors sau NAS (https://www.globalsecurity.org/military/world/russia/soks.htm )

NAS pe HMS Trafalgar

SOKS pe SSN Akula class
COMBUSTIBILI
Motorina: proprietatile chimice, cifra cetanica, densitatea si vascozitatea motorinei difera de la o tara la alta atat datorita standardelor in vigoare cat si datorita infrastructurii (instalatiile si tehnologiile de rafinare din rafinariile care o produc), standardele cele mai cunoscute care definesc proprietatile motoriei sunt EN 590, ASTM D975, GOST R 52368, DIN 51601 precum si NATO F 54 care este echivalentul EN 590.
Compozitia motorinei variaza functie de producatori (procesul de rafinare), de titeiul din care este produs (hidrocarburi parafinice, naftelnice, aromatice), de ce aditivi sunt adaugati, insa formule uzuale sunt: C16H34 ; C12H23
In NATO combustibilul standard este F-44 (STANAG 3747 – kerosen pt turbine aeroderivate ce sunt utilizate pe nave) sau F-75 (STANAG 1385) ce poate fi utilizat atat in motoare cu piston (MAC) cat si in turbine navale sau boilere pt prepararea aburului. Ideea initiala a fost de a avea un combustibil universal, utilizat atat la avioane, turbine de pe tancuri, turbine navale, motoare cu piston (MAC) – motivele sunt mai mult decat evidente. Problema este ca in Europa capacitatile de rafinare au scazut (fie din considerente economice fie ecologice), iar productia de kerosen este scazuta (dintr-o tona de titei brut se poate extrage doar o anumita cantitate de motorina, benzina, kerosen).
Metanolul (CH4O sau CH3OH) este un alcool, care pune anumite probeleme in exploatare: este mult mai volatil decat motorina, fiind foarte inflamabil si este toxic (actioneaza asupra sistemului nervos, ingestia a cca 10 ml poate duce la orbire permanenta, putand fi deasemenea metabolizat ca acid formic).
Metanolul poate fi utilizat pt obtinerea de alti carburanti prin procese specific (methanol-to-hydrocarbons (MtH), methanol to gasoline (MtG), methanol to olefins (MtO)), si este utilizat ca aditiv in benzina. Metanolul poate fi utilizat direct ca si carburant in motoarele cu combustie interna rezultand dioxid de carbon si apa, insa una din problemele utilizarii metanolului este actiunea coroziva a acestuia in special asupra componentelor din aluminiu : 2CH3OH + 3O 2 → 2CO2 + 4 H2O.
Producerea de hidrogen din orice hidrocarbura este realizata in mod curent (in proportie de pana la 80%) prin una din urmatoarele tehnologii: Steam Methane Reforming (SMR), Partial Oxidation (POX) si Autothermal Reforming (ATR) Catalytic Reforming pentru hidrocarburi lichide (CRLH) – (pentru cine este interesat de mai multe detalii: https://www.hydrogen.energy.gov/pdfs/review05/pdp_8_erickson.pdf si https://file.scirp.org/pdf/JPEE_2019012515395175.pdf ).
Obtinerea hidrogenului prin reformarea metanolului, este si cea mai atat eficienta energetic cat si economic (tinand cont de consmurile specific necsare obtinerii unui m3 de hidrogen).
Consumurile specifice, tipul combustibililor (proprietatile lor fizico-chimice), cantitatea necesara de LOX, au influenta asupra flotabilitatii submarinelor. Repartitia maselor prin modul in care sunt dimensionate si amplasate rezervoarele pt aceste lichide, precum si subsistemele de gestionare ale lor.
Avantaje / Dezavantaje
Utilizarea unei tehnologii care reformeaza motorina are avantajul ca trebuiesc imbarcate pe submarine, in cantitati mari, doar doua substante: motorina atat pentru motorul diesel cat si pentru producerea hidrogenului, si oxigenul lichid pentru producerea energiei electrice in pilele de combustibil si pt functionarea motorului diesel in submersie.
Utilizarea metanolului pt reformare presupune imbarcarea motorinei (pentru motorul diesel), precum si a metanolului (pentru obtinerea hidrogenului) si oxigenului, pentru producerea energiei electrice in pilele de combustibil.
Aceasta a doua tehnologie nu este mai putin periculoasa decat cea utilizata de submarinele germane (U-212; U-214) prin imbarcarea directa a hidrogenului si oxigenului lichid pentru producerea energiei electrice in pilele de combustibil si separate a motorinei pentru motorul diesel.
Utilizarea unui motor Stirling presupune o sursa de caldura. Aplicatiile industriale sunt de obicei axate pe recuperea caldurii din cazane (boilere), din gazele de ardere a motoarelor cu combustie interna (motoare cu piston MAC sau MAS ori turbine), sau prin recuperarea caldurii din diverse procese tehnologice prin intermediul unor schimbatoare de caldura. Avantajul major al unui sistem AIP cu motor Stirling este folosirea unui unic carburant (cu toate ca sunt necesare si imbarcarea de oxygen lichid si gaze inerte daca se doreste utilizarea motorului diesel in submersie) si simplitatea constructiva (e destul de relativa aceasta afirmatie, deoarece functionarea pe un submarin presupune mult mai multe decat un motor Stirling pentru aplicatii industriale sau casnice).
Unul din dezavantajele motorului Striling este eficienta redusa, deci asigurarea unei autonomii destul de limitate, datorata capacitatii motorului de a reincarca bateriile.
Alte dezavantaje: ca sa poata genera curent si in submersie, motorul diesel va avea nevoie de oxigen lichid plus un gaz inert (asa numitul motor diesel cu ciclu inchis, utilizat si pe submarinele germane din al doilea razboi mondial); adancimea de operare este limitata la presiunea hidrostatica echivalenta a presiunii de evacuare a gazelor arse (max 20 bar sau 200 metri in submersie); gazele dizolvate in apa pot lasa o urma detectabila atat ca diferenta de temperatura cat si chimic (in special CO2) – pentru a disperasa in apa marii, gazele de ardere, sunt necesare sub-sisteme suplimentare, deci costuri adiacente; datorita faptului ca in motorul Stirling sunt multe componente mecanice in miscare, costurile generate de diversele metode utilizate pentru a atenua zgomotul pot reprezenta un dezavantaj, iar costurile cu mentenanta sunt relative ridicate.
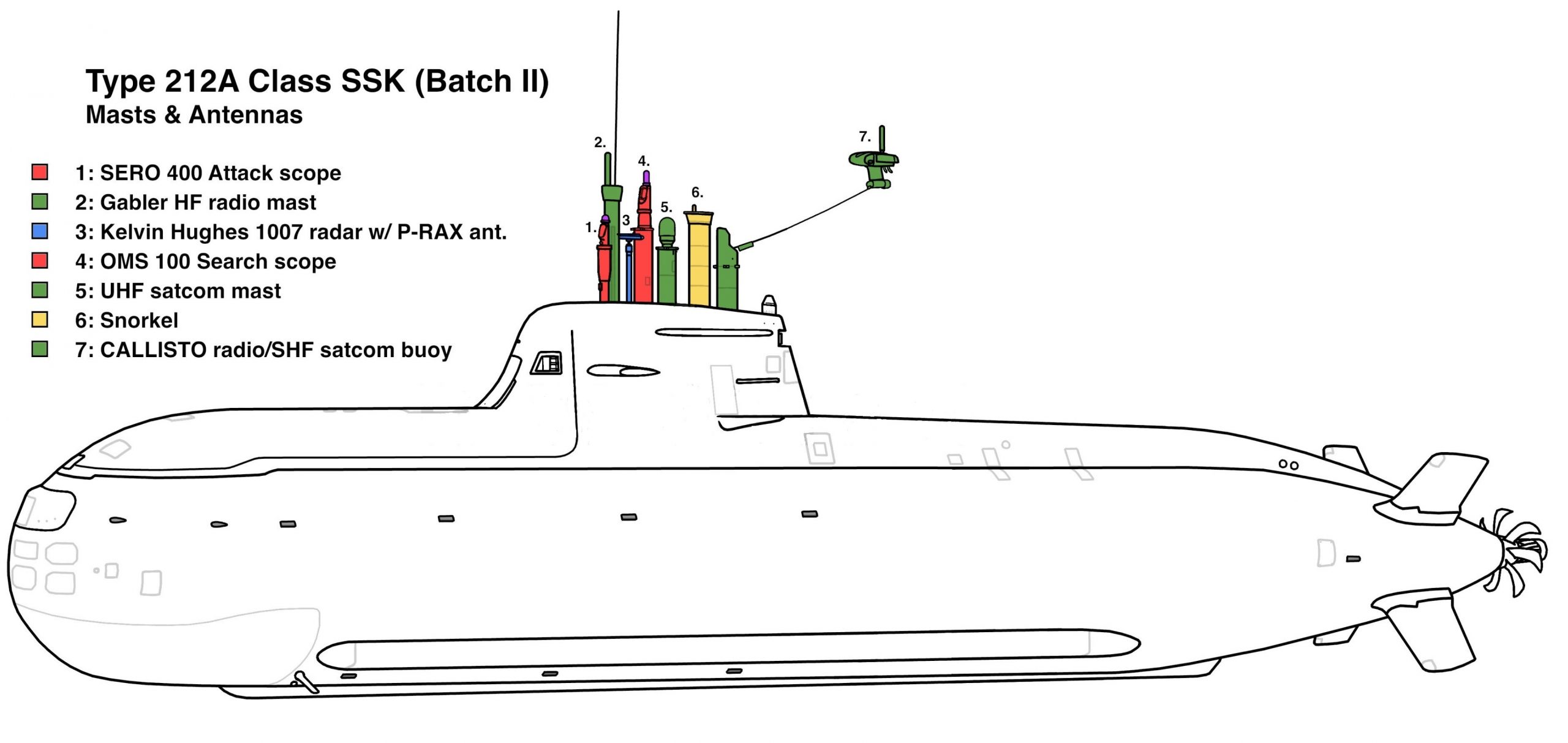
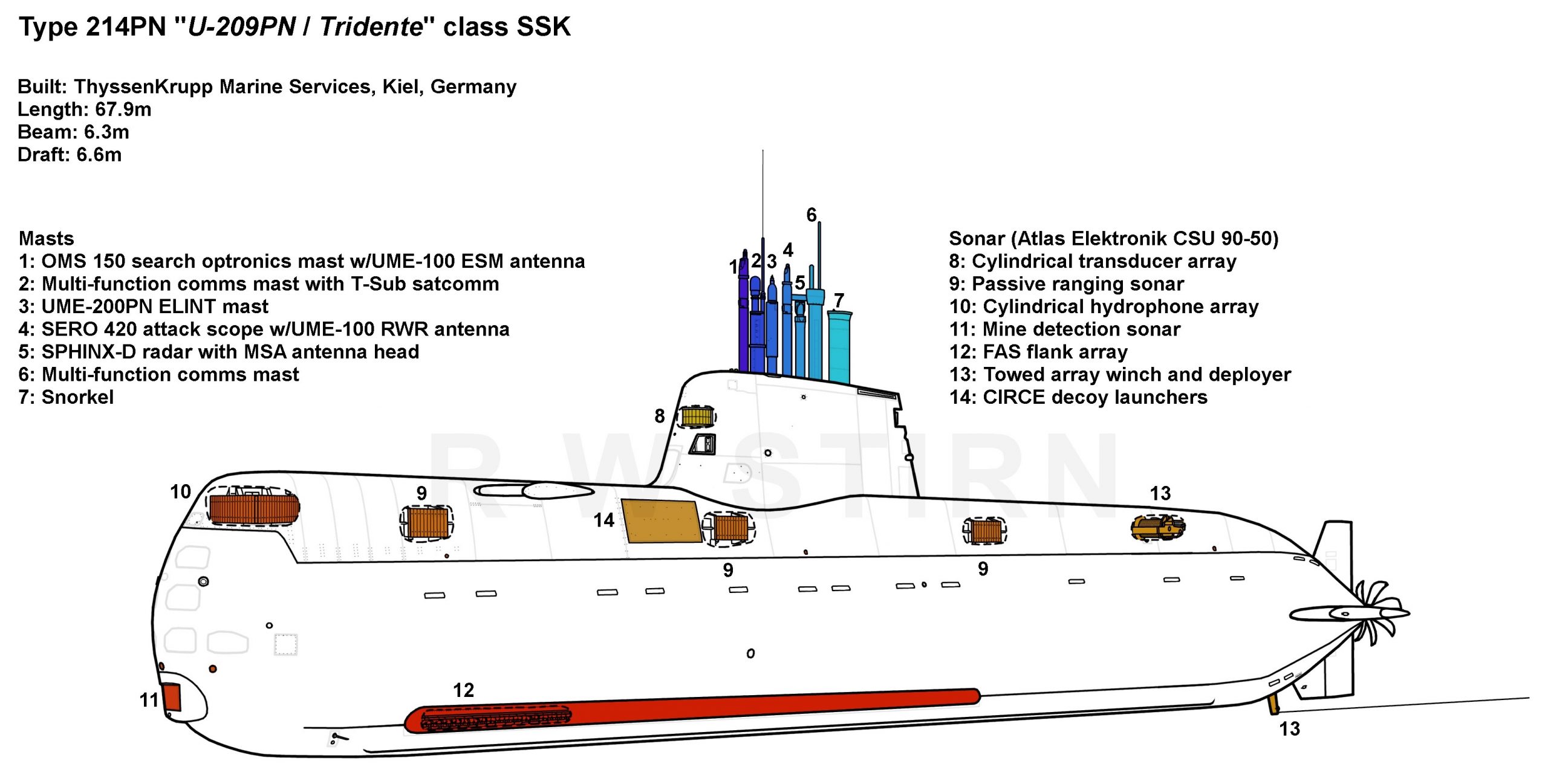
Sistemele de evacuare a gazelor arse, si a celor care asigura aerul necesar cand submarinul este aflat in submersie insa la adancimea periscopului, au deasemenea influente asupra distributiei maselor, precum si a celorlate sub-sisteme (mai jos modul de dispunere a snorker-ului la U-209, U-212 si U-214).
| U-209, U-212, U-2014 diferentele intre motoarelor si rezervoarelor |
BATERII
După cum știm, bateria este principala sursă de energie a submarinului convențional și este, de asemenea, sursa de alimentare de rezervă și de urgență pentru submarinul nuclear.
Prin urmare, performanța bateriei determină în mod direct performanța și capacitatea de luptă a submarinului. Dacă performanța bateriei nu este bună, alimentarea cu energie este insuficientă, submarinul va fi lent, autonomie in submersie / mobilitatea este foarte limitată, timpul de încărcare este mai lung, iar riscul de a fi expus este mult mai mare.
Bateria plumb-acid este o tehnologie matură, cu fiabilitate ridicată, o siguranță bună in exploatare, o durată de viață relativ lungă și o întreținere ușoară. Cu toate acestea, neajunsul său este densitatea energetică scăzută și capacitatea redusă. Prin urmare, este adesea necesar să se utilizeze sute de celule individuale în serie.
Greutatea mare rezultata in urma inserierii mai multor celule, reprezinta doar partial un neajuns, bateriile reprezentand o componenta importanta din lestarea submarinului.
În primul rand, in comparație cu bateriile plumb-acid, volumul și greutatea bateriei cu litiu sunt mai mici. Energia electrică generată la același volum ocupat, este de cel puțin trei ori mai mare decât cea a bateriei cu plumb-acid, ceea ce ajută la reducerea greutății submarinului, la economisirea spațiului și la îmbunătățirea rezistenței și mobilității submarinului, insa presupune regandirea lestarii navei.
În al doilea rând, bateria cu litiu are o viteză de încărcare mai rapidă și o eficiență ridicată, ceea ce poate reduce foarte mult timpul de încărcare si expunerea submarinului la suprafata, îmbunătățind astfel gradul de disimulare și capacitatea de supraviețuire a submarinului.
În al treilea rând, bateria cu litiu nu trebuie să respecte cerințe prea stricte de încărcare și descărcare pentru a prezerva durata de sa viață, bateriile cu litiu putand fi încărcate / descărcate în funcție de cerințele misiunii și de mediul câmpului de luptă, îmbunătățind în mod eficient flexibilitatea de operare.
Cu toate acestea, din cauza nivelului actual al tehnologiei și al proceselor tehnologice precum si de exploatare, bateriile cu litiu au încă multe probleme insurmontabile, astfel încât perspectivele de aplicare a acestora sunt puse sub semnul întrebării.
Prima dintre ele este securitatea. Bateria cu litiu emite multă căldură atunci când este utilizată sau când este încărcată și descărcată, aceasta putand presupune un subsistem dedicat pentru racire. Dacă problema disipării căldurii este rezolvată, ramane oricum cantitatea de radiații infraroșii a submarinului care este mare, crescând astfel riscul de detectabilitate a navei. De asemenea, aceasta afectează fiabilitatea și stabilitatea activității submarinului. Nu in ultimul rand : pericolul de incendii (exemplele de baterii cu litiu utilizate in industria auto si aeronautica fiind notorii), acestea reprezentand pe submarine un pericol mortal.
În al doilea rând, costul ridicat. În condiții normale, costul bateriilor cu litiu este de câteva ori mai mare decât cel al bateriilor tradiționale cu plumb-acid, iar numărul de baterii cu litiu necesare pe un submarin este mare. Împreună cu sistemele auxiliare costul submarinelor este foarte ridicat.
Un compromis, poate fi realizat prin utilizarea mixta: pentru propulsie bateriile clasice, iar pentru asigurarea redundantei in alimentarea cu energie pentru anumite sisteme/sub-sisteme se pot utiliza baterii cu litiu.
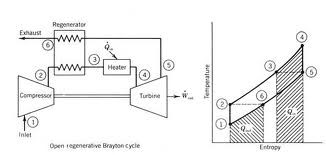
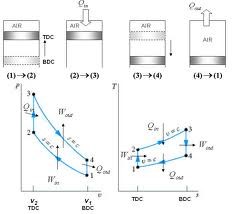
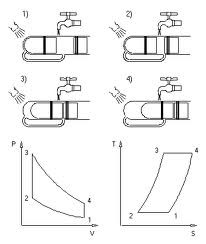
Parte a II-a va aborda sistemele de propulsie (pe submarine se pot regasi mai toate ciclurile cunoscute).
 |
 |
 |
 |
| Brayton | Otto | Stirling | Rankine |